前言
這周繼續讀三維重建方面的技術向課件。按照之前的大綱,這次讀到前AI時代中,計算機視覺方面的一項技術——
Structured Light(結構光)。這項技術作為立體視覺之後提出的一項技術,其理解跨度相對不算大。
簡單來說,這是一項用激光等光源投在物體表面、再用相機等設備進行採樣的技術,注重還原物體的三維結構。
介紹結構光的論文其實也很多,但作為個人能全部仔細讀完以及圖文搭配合適的內容,這次我選擇了UTAH於2015年的計算機視覺課件。和之前一篇比較長的PPT拆分成上下兩篇不同,這次這個課題下的課件本身就有兩篇——因此這次粗讀的是兩篇中的第一篇完整部分;下週則會讀第二篇。
由於沒有課件文稿,因此PPT部分以翻譯為主,打星號的部分是我的個人理解或補充,主要是對課件中一些值得展開介紹的部分補充分析或外部信息。
一、引入與概述
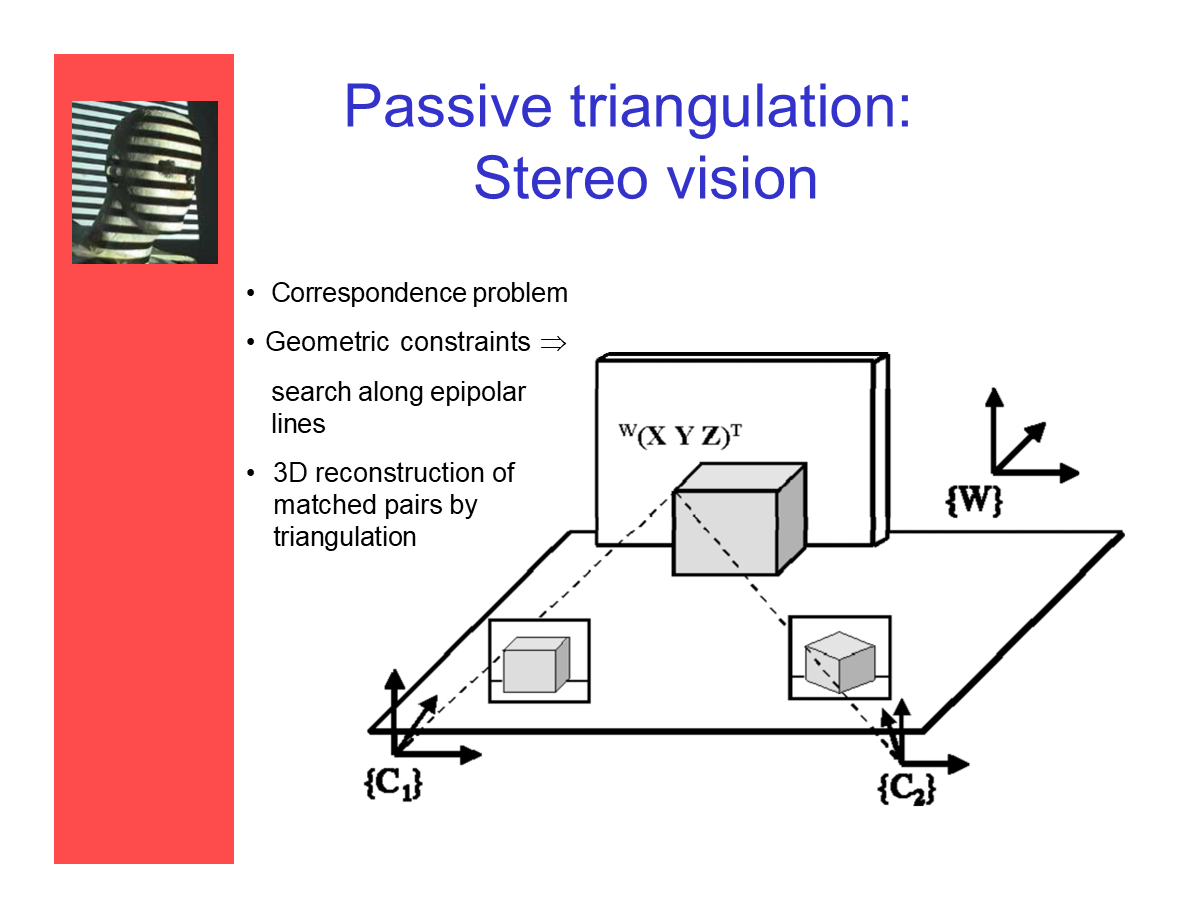
被動三角測量:立體視覺
- 對應點問題
- 幾何約束——沿著極線查找
- 基於匹配點的三角測量進行三維重建
*基本上概括了立體視覺部分的基本思路,細節的一些矩陣計算在上次讀的部分也介紹了。
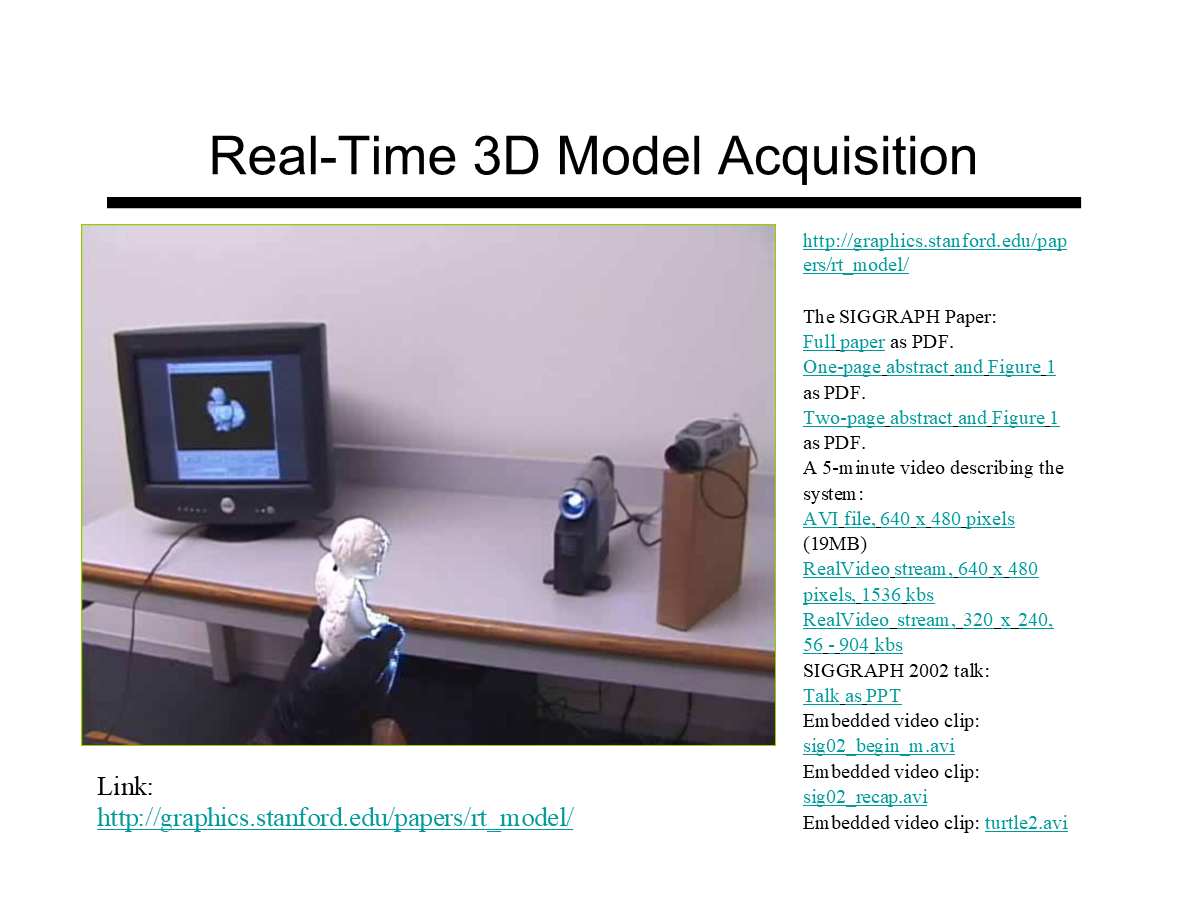
實時3D模型獲取(重建)
*這裡面提到了很多演示和鏈接,文末會附整篇課件的原文。雖然當時的一些設備還相對比較簡單,但也反映出了這項方案的最小可運行規模。
結構光
——基於攝影測量的主要問題:
- 為從多個視圖中還原場景物體的形體,我們需要找到圖中的對應點。
- 這一匹配(對應)問題是很難的。
- 沒有較好定義過的圖像點集,就無法在圖像域中還原3D物體的幾何結構。
——結構光方案:
- 理念:通過同構(相似)的點集合,找到一種方式來簡化匹配和確保獲知密度覆蓋信息。
- 基本策略:使用照明設備來人為創造對應點。
- 或許是實踐中最為穩固(魯棒 robust)的方案。
- 被廣泛使用(工業測量、娛樂產業...)。
- 也被稱為“動態立體視覺”或“白光掃描”。
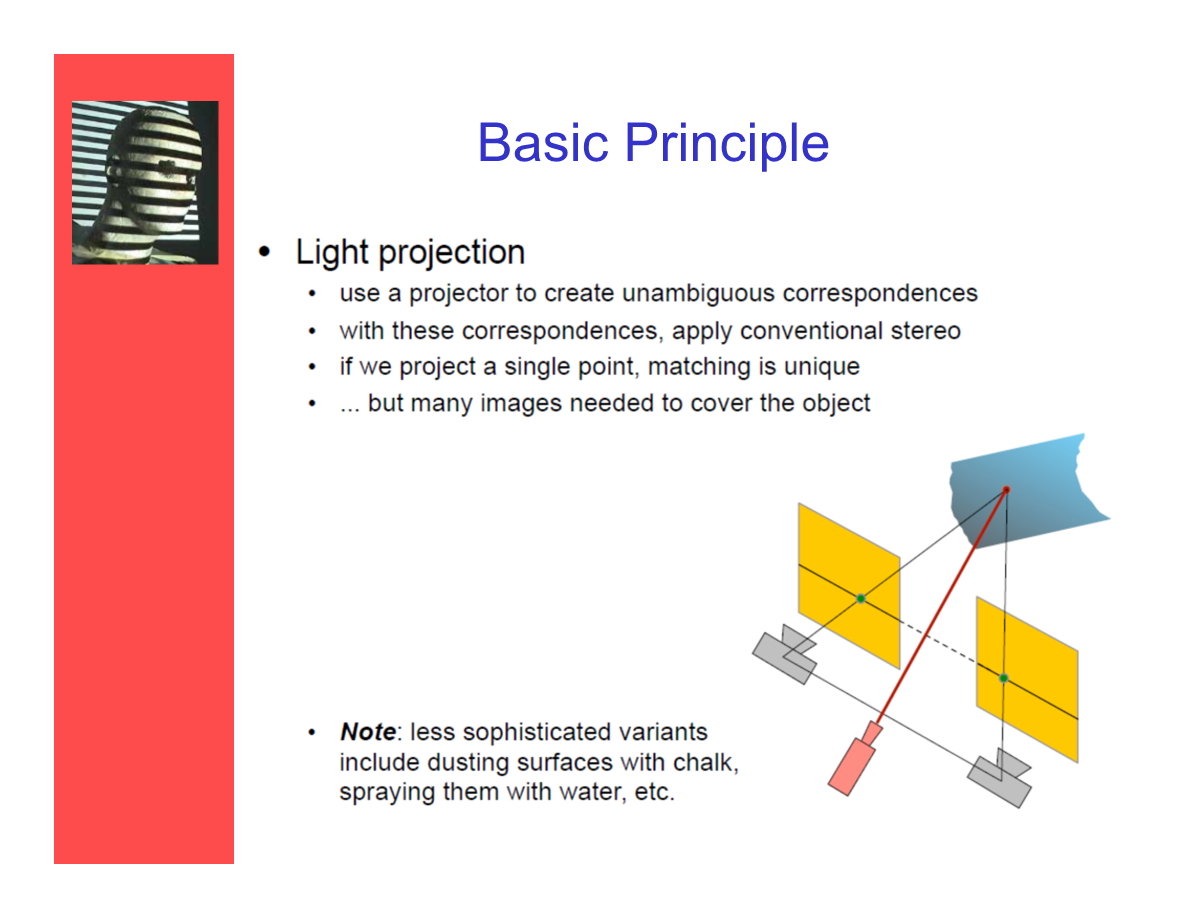
基礎原則
——光投射:
- 使用一個投射器來創造無歧義的對應關係。
- 通過這些對應關係,應用常規的立體(視覺)。
- 如果我們僅投射一個點,則匹配結果是唯一的。
- ...但這樣要覆蓋一個物體則需要太多圖片。

特殊情況:光點立體視覺
圖中:基於基本的光點立體解析的常規設備設置方案。
校準相機:通過左右側攝像機的探測以完全確定點的3D位置。光點掃描跨越整個場景。
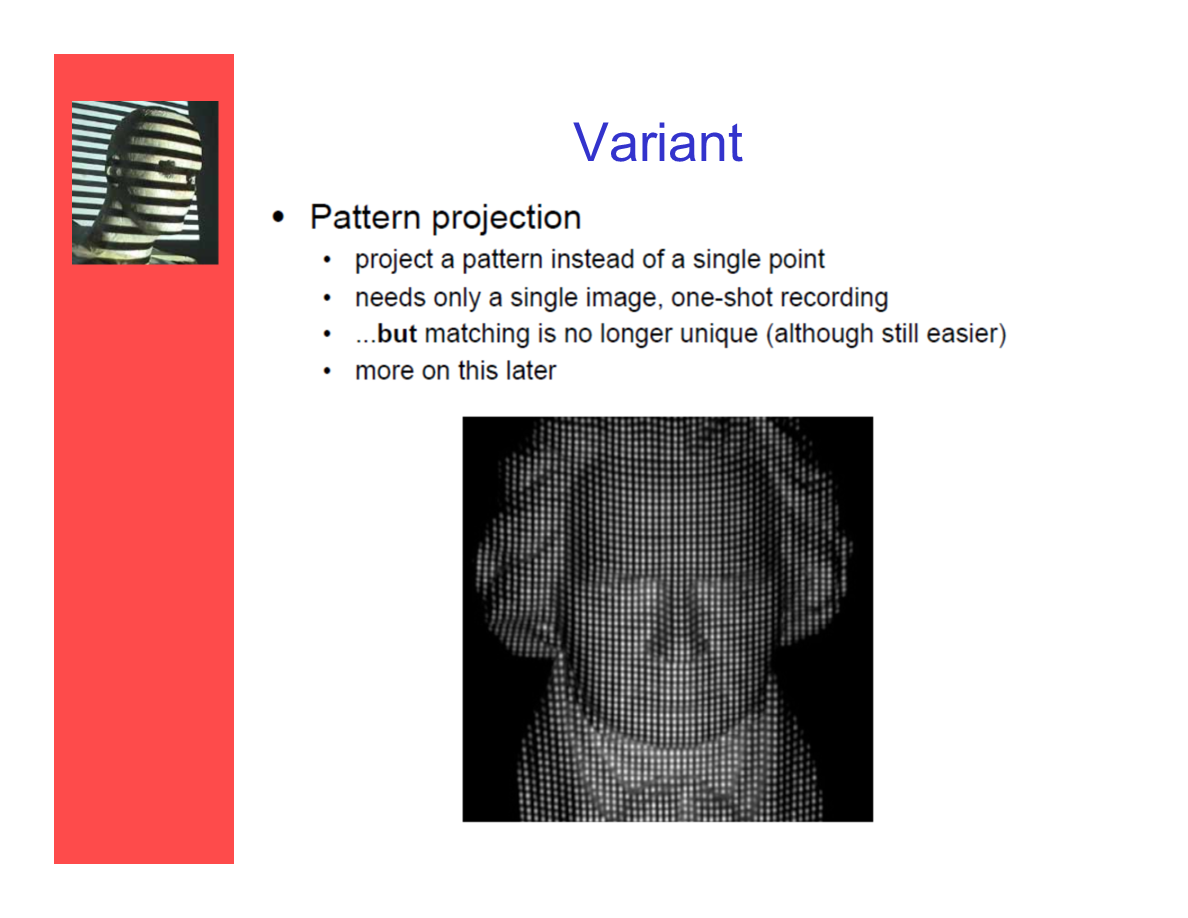
變體應用
——紋樣投射:
- 投射一個紋樣而不僅是一個點。
- 只需要一張圖,記錄一次拍攝。
- ...但是匹配結果可能不再是唯一的(儘管還是足夠簡單)。
- 後續(第二篇)會展開介紹。
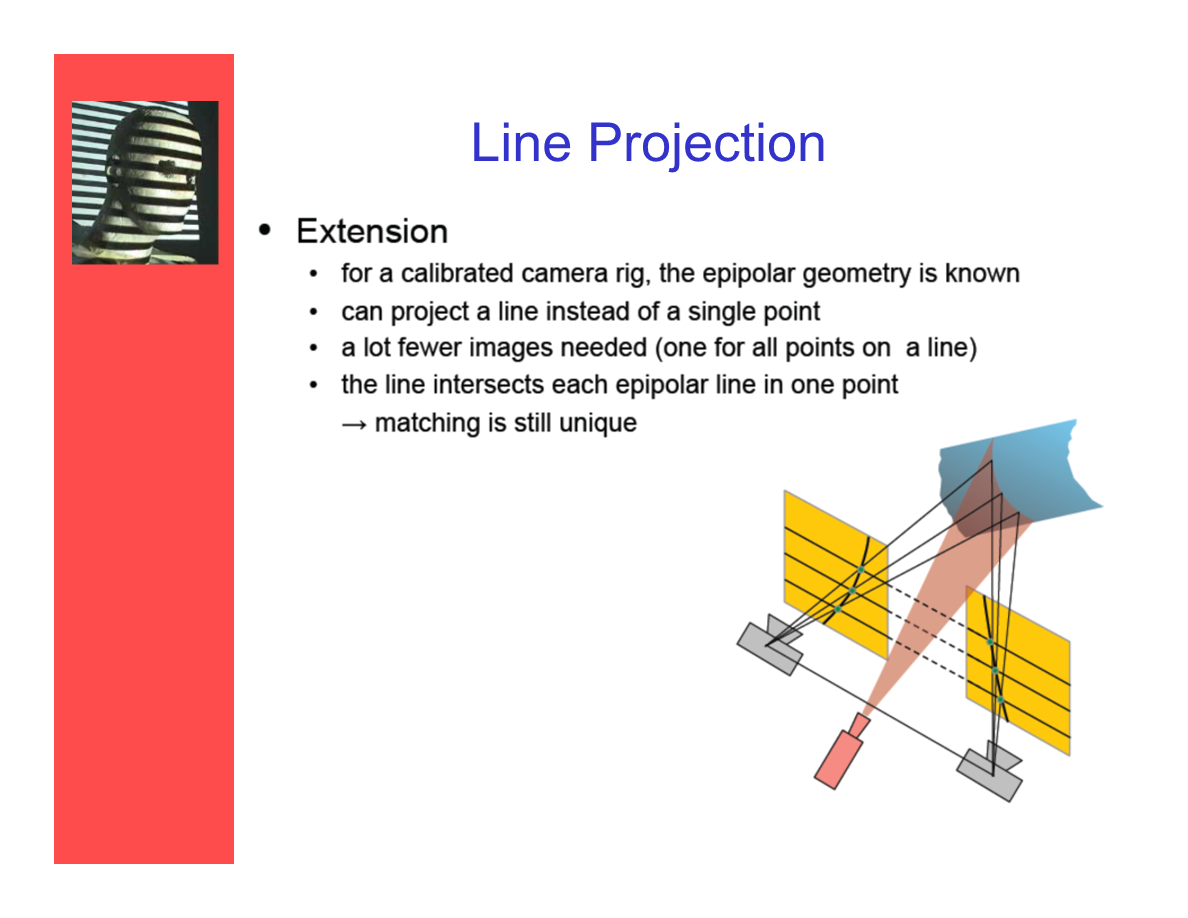
線投射
——擴展:
- 對於一個校準攝像機裝置,它的對極幾何(固有屬性)是已知的。
- 可以投射一條線而不是一個點。
- 需要相對更少的圖片(每條線上的所有點一張)。
- 掃描線與極線在一個點相交——匹配結果仍然是唯一的。
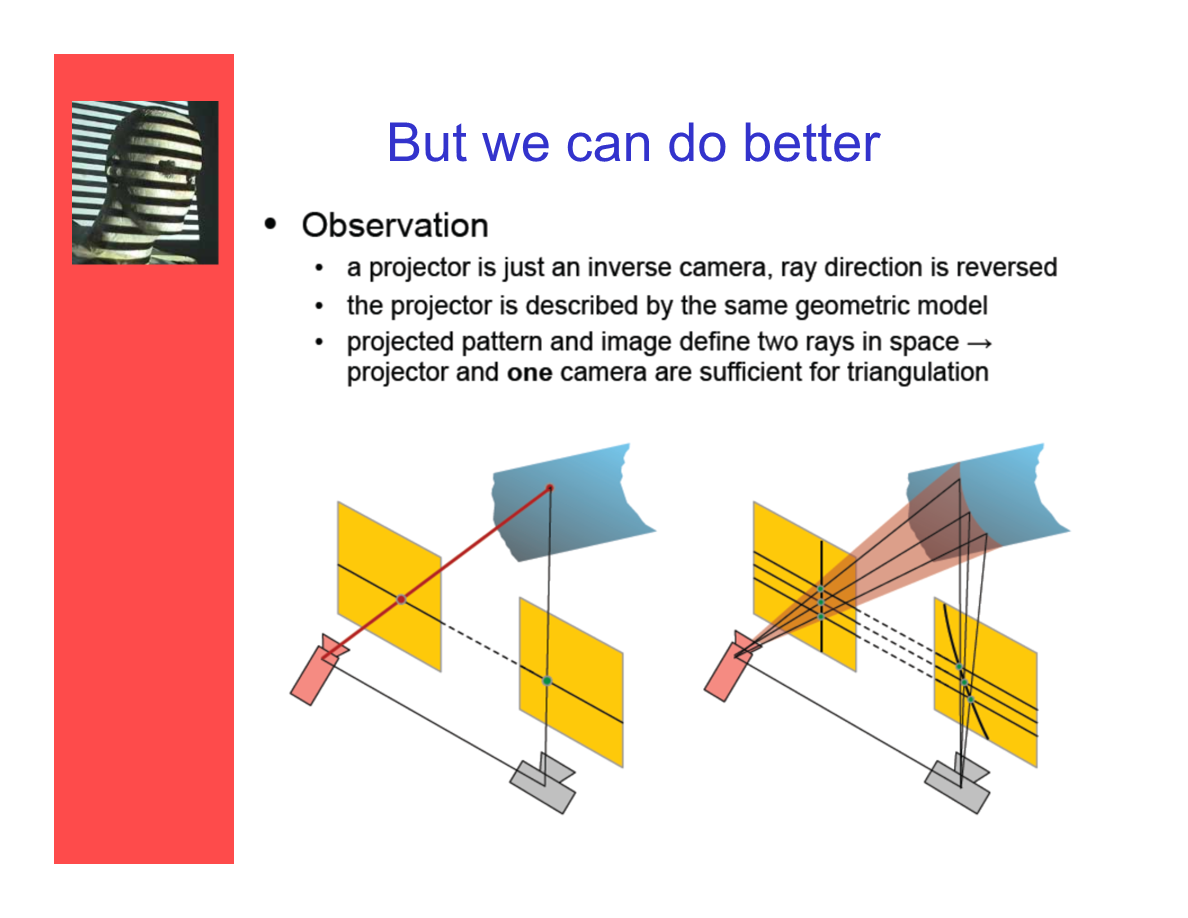
但我們能更進一步
——觀察:
- 一個投射器可以理解成一個“逆攝像機”,射線的方向是逆向的。
- 投射器被以(和攝像機)相同的幾何模型來描述。
- 投影紋樣和圖像定義了空間中的兩條射線——投影器和一臺攝像機就足夠進行三角測量了。
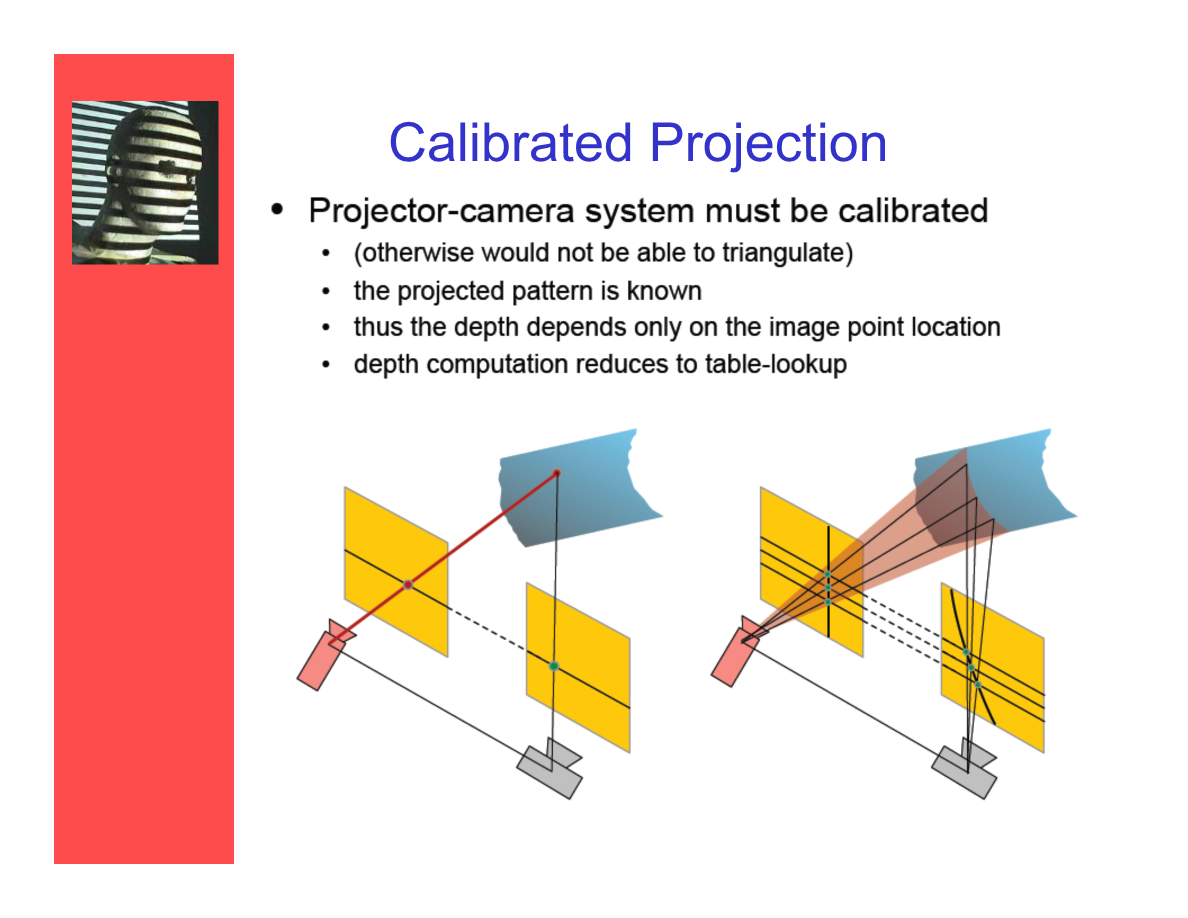
校正投射
——投射攝像機系統必須經過校正:
- (否則無法進行三角測量)。
- 投射紋樣是已知的。
- 因而深度計算僅依賴於圖像上點的位置。
- 深度計算能簡化成查表的過程。
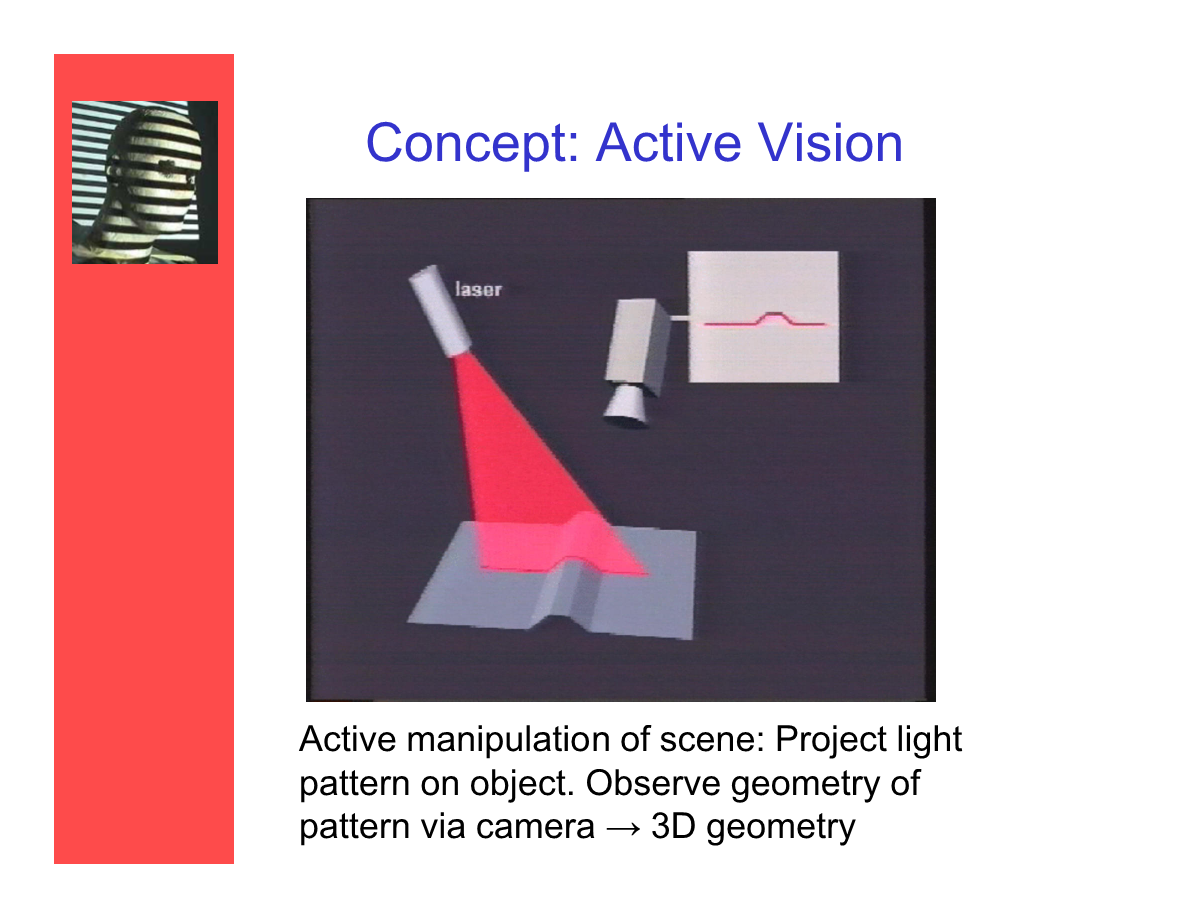
概念:主動立體視覺
主動對場景做操作:對物體投射光紋樣——通過攝像機觀測紋樣——還原3D幾何。
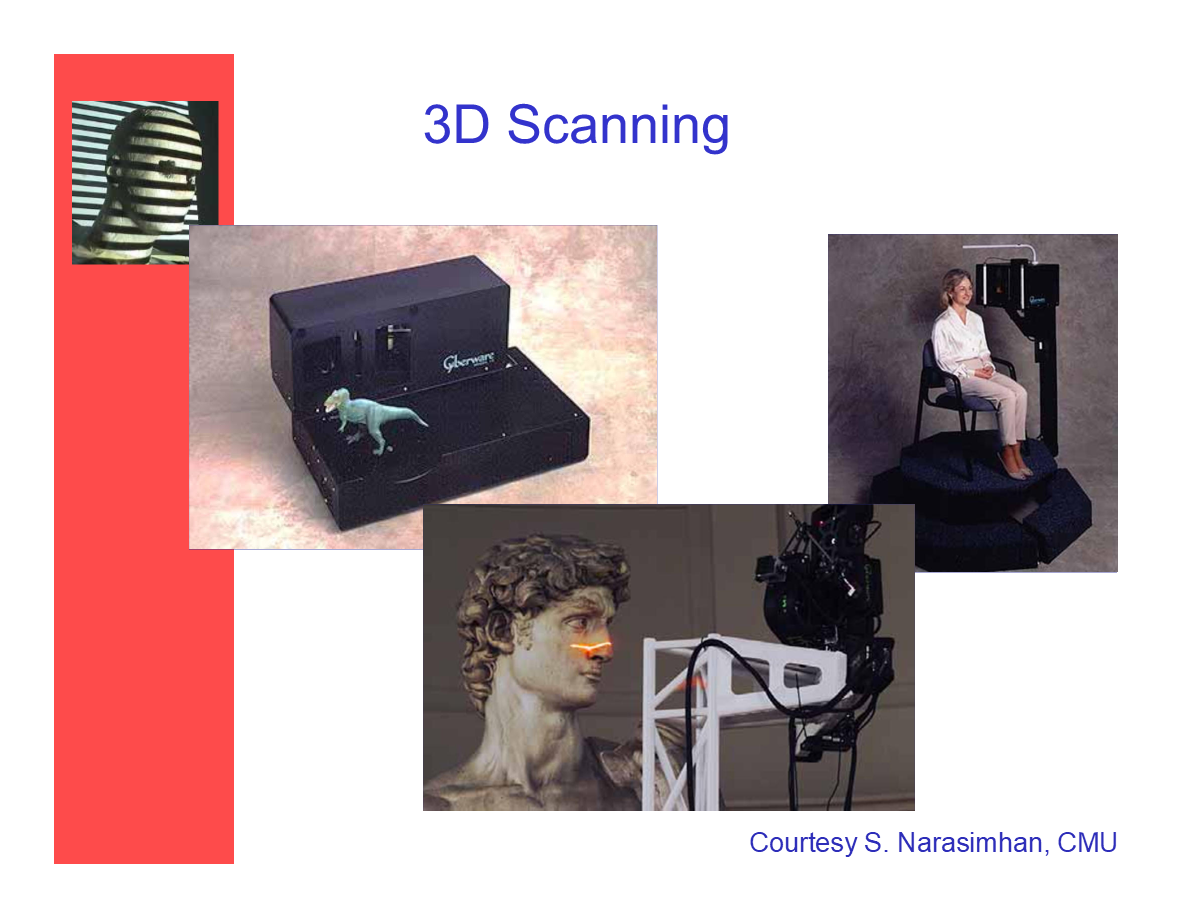
主動3D掃描的一些案例
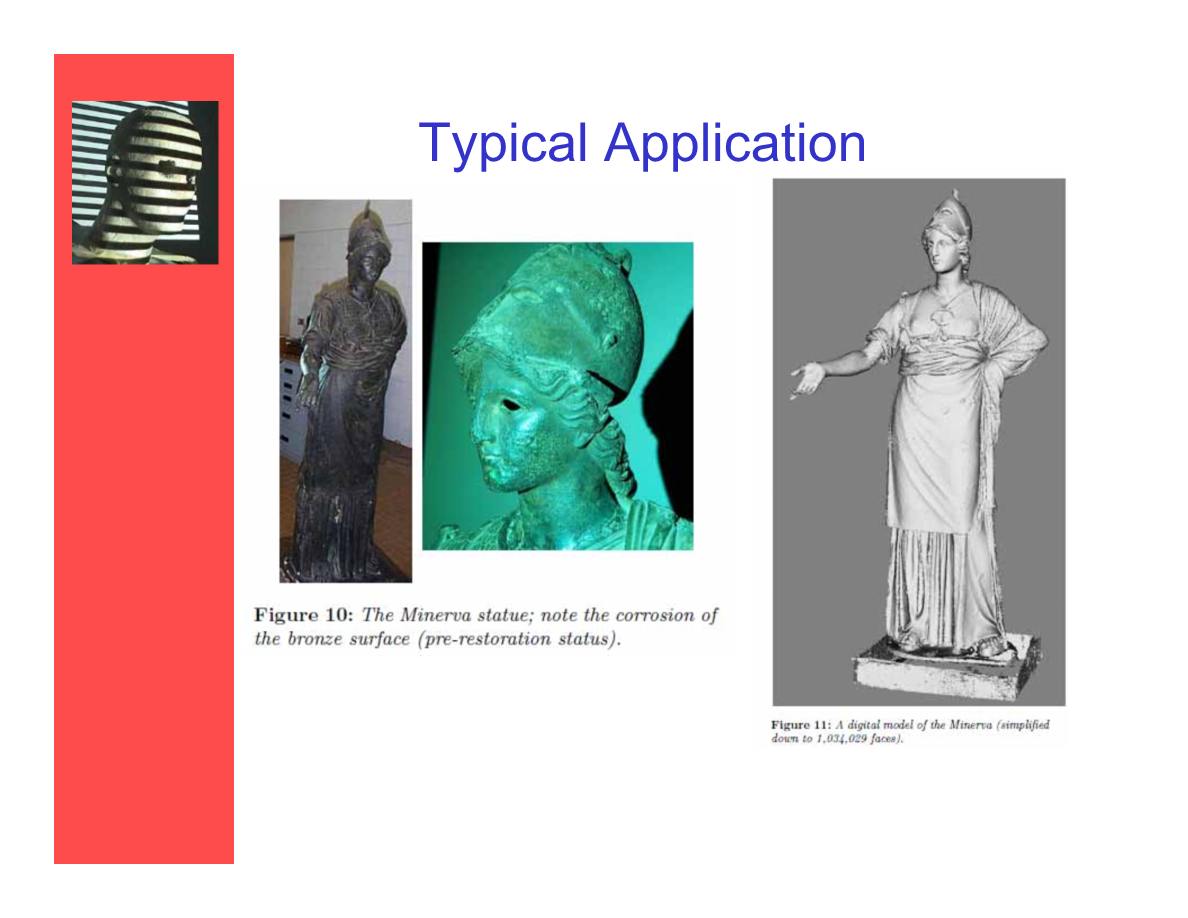
典型的應用
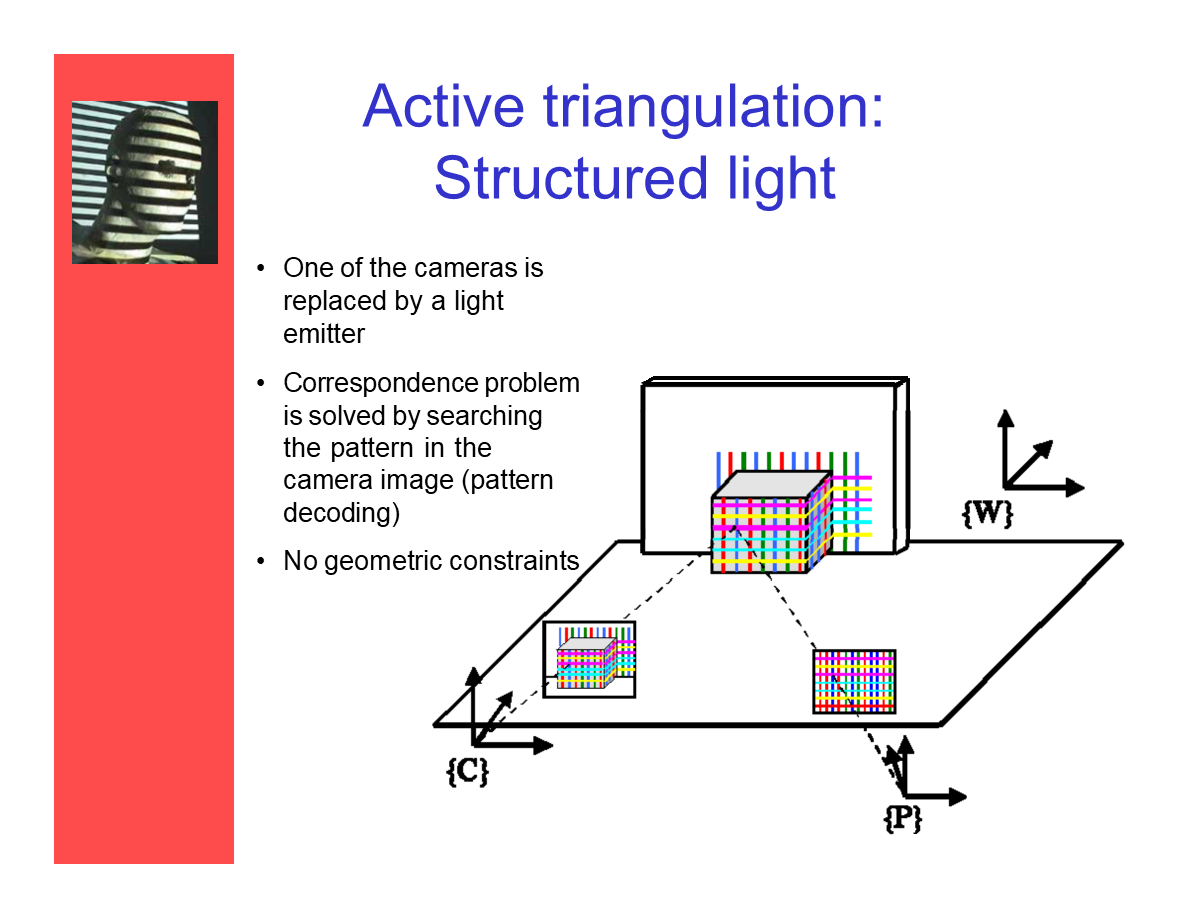
主動三角測量:結構光
- 其中一個攝像機被光投射器代替。
- 對應點問題被轉化為在攝像機對應圖像中進行紋樣查找的問題(紋樣解碼)。
- 沒有幾何約束。
概述
*從概述來看,這部分內容我按邏輯接近程度拆成了4節。
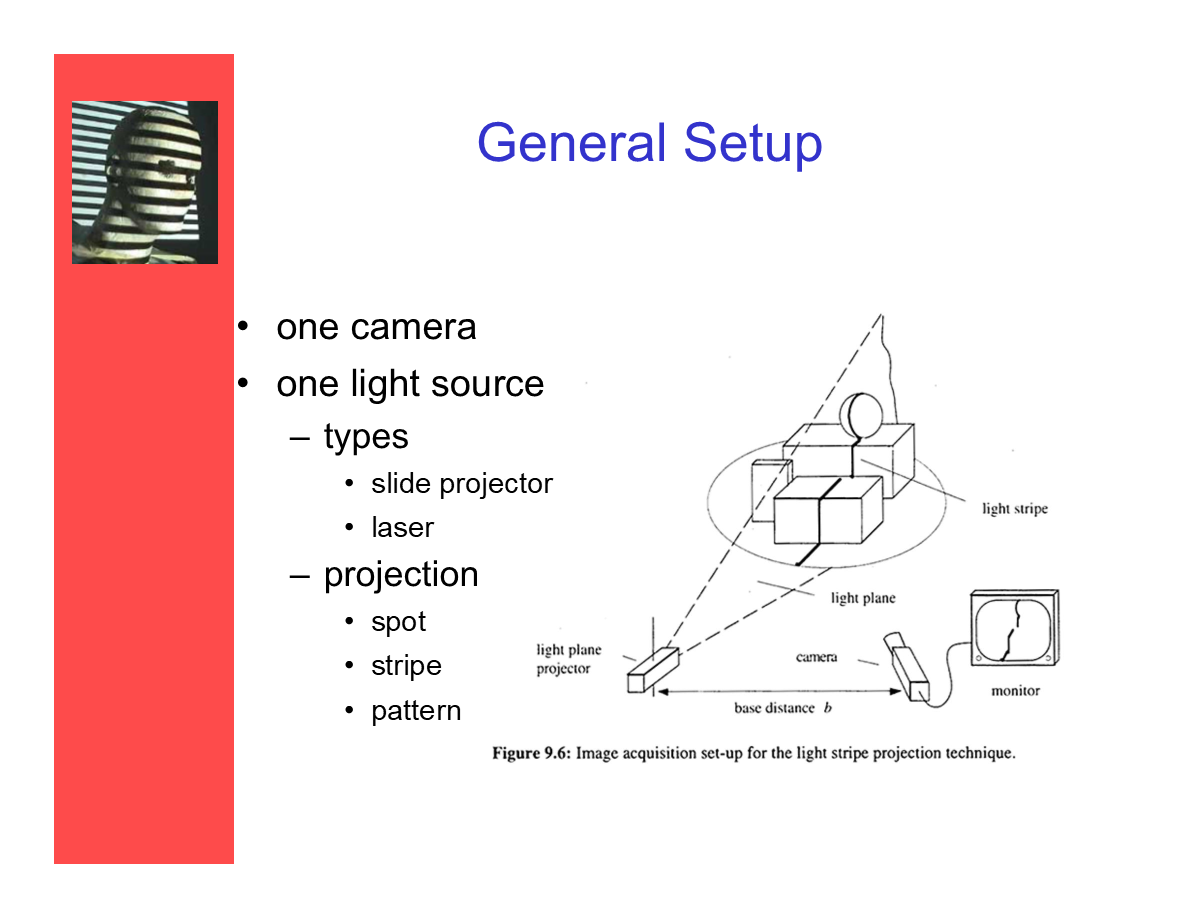
基礎設置
一個攝像機。
一個光源:
- ——類型:滑動投射器;激光。
- ——投射:點;帶狀;紋樣。
二、光點投影
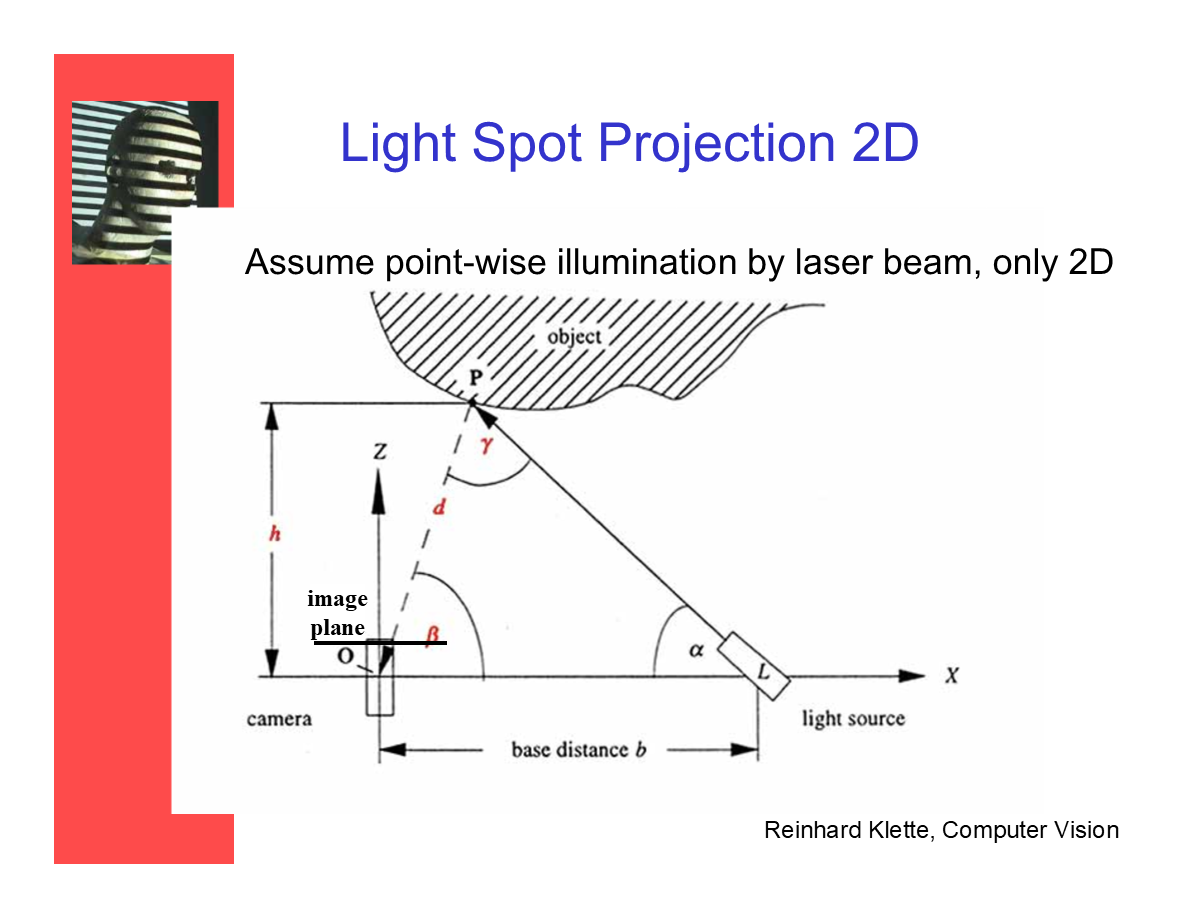
2D光點投射
假設激光束在2D平面上進行逐點式照明。(即設備只考慮水平距離及旋轉,接收設備視為一個線段而不是平面)
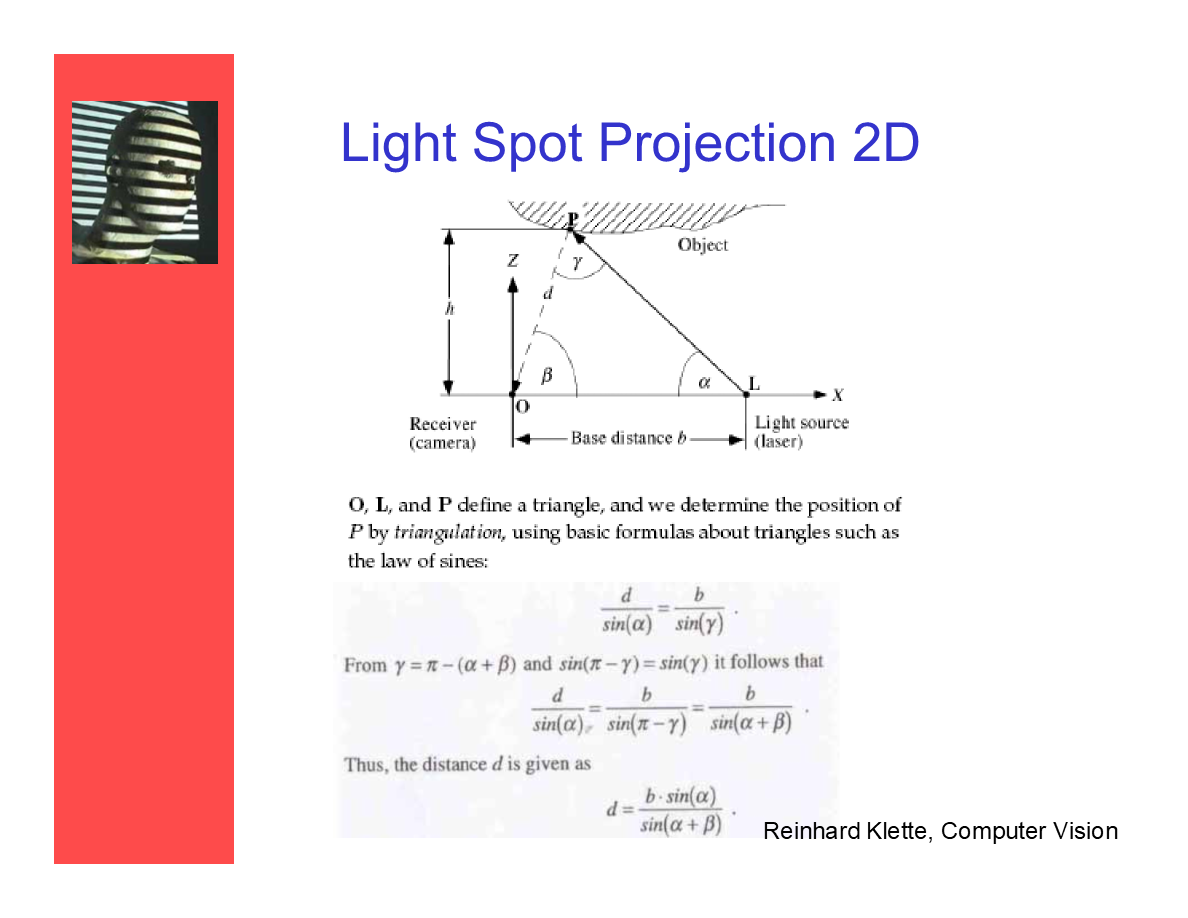
O、L和P點定義了一個三角形,並且我們通過三角測量確認了P點的(空間)位置——使用瞭如圖中公式的基礎三角函數sine法則。
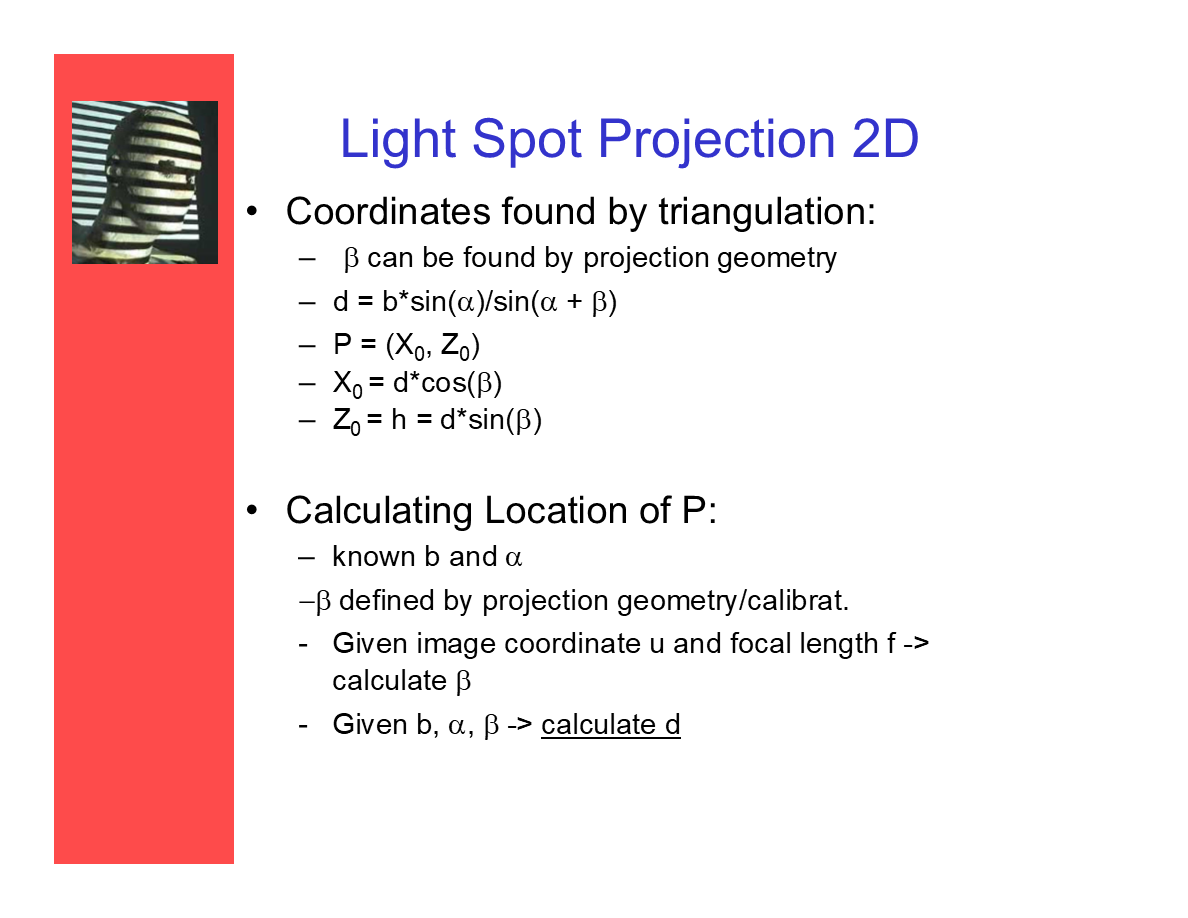
通過三角測量可得出的座標:
- β可以通過(攝像機)投影幾何得出。
- d值的計算(見圖中公式)。
- P的座標用X0,Z0表示——分別可以用d與β的三角函數計算出。
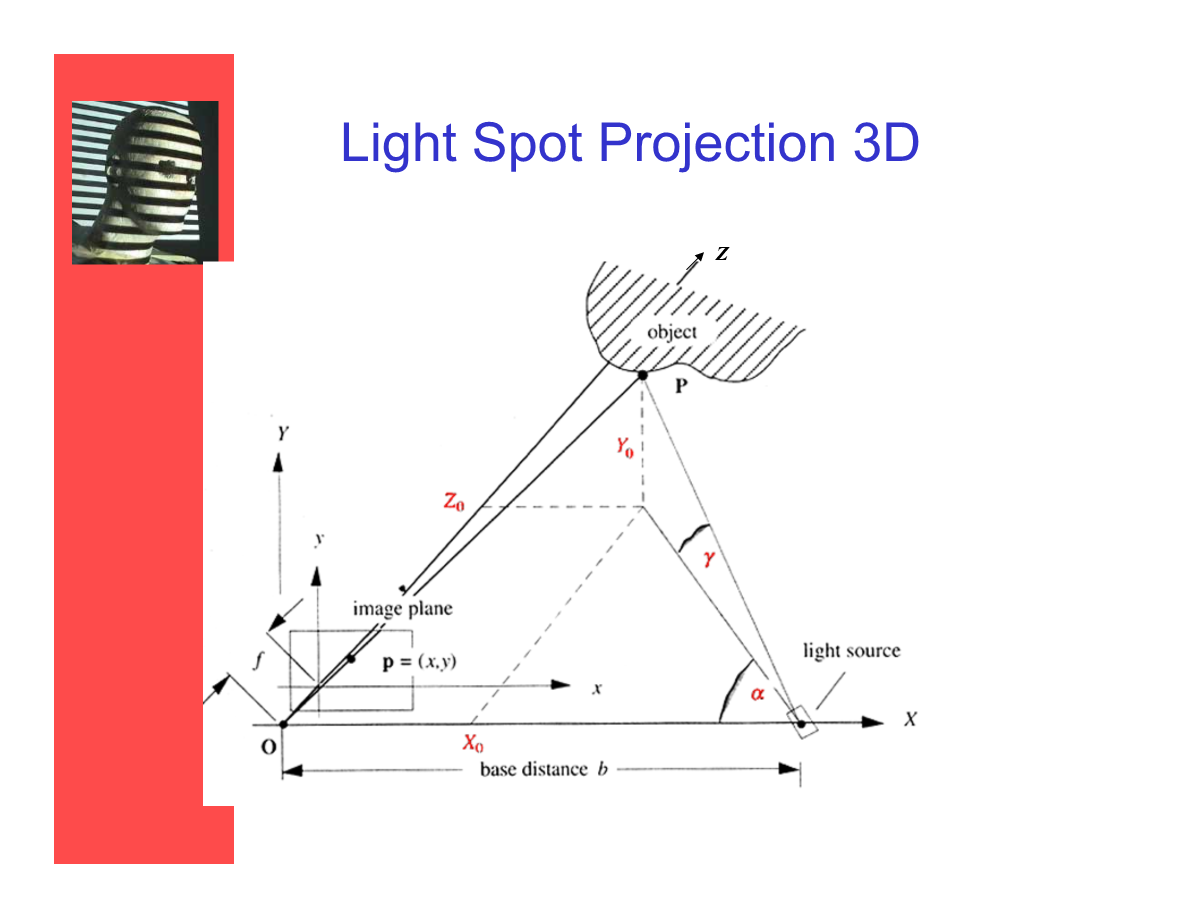
3D光點投射
*3維的情況引入了y軸,接收投影的變成了平面——投影點p位於該平面上。
*發射角度上,除了水平角α,還引入了垂直角γ。
*這裡在設備設置後,α和b都是已知給定的。
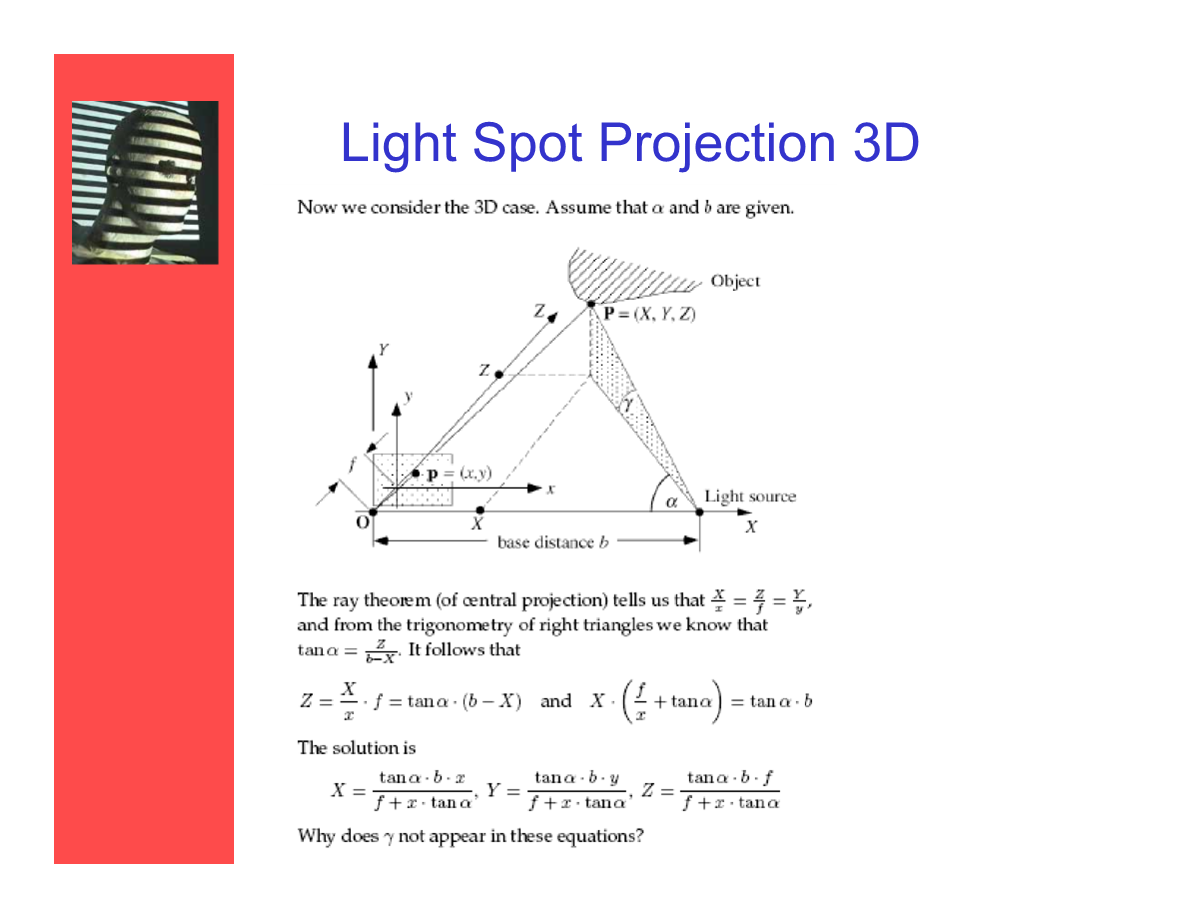
*根據中心點投射的射線定理(ray theorem)——P點的座標XZY和xfy成正比,其中xy是投影平面上的點p的座標,f是中心點O到投影平面的距離(寫作f其實就是焦距)。
*對於XZ平面上的角α來說,tanα = Z / (b - X)。
*結合前面兩個結論可以分別推導出XYZ和tanα的關係(如圖)。
最終可以根據α、b 、f、x、y分別計算出X0、Y0、Z0。
一個觀察,這部分計算中並沒有用到垂直角度γ。
*即根據設備基礎的位置角度信息,及投影座標x、y即可計算點P的座標。
三、光帶投影
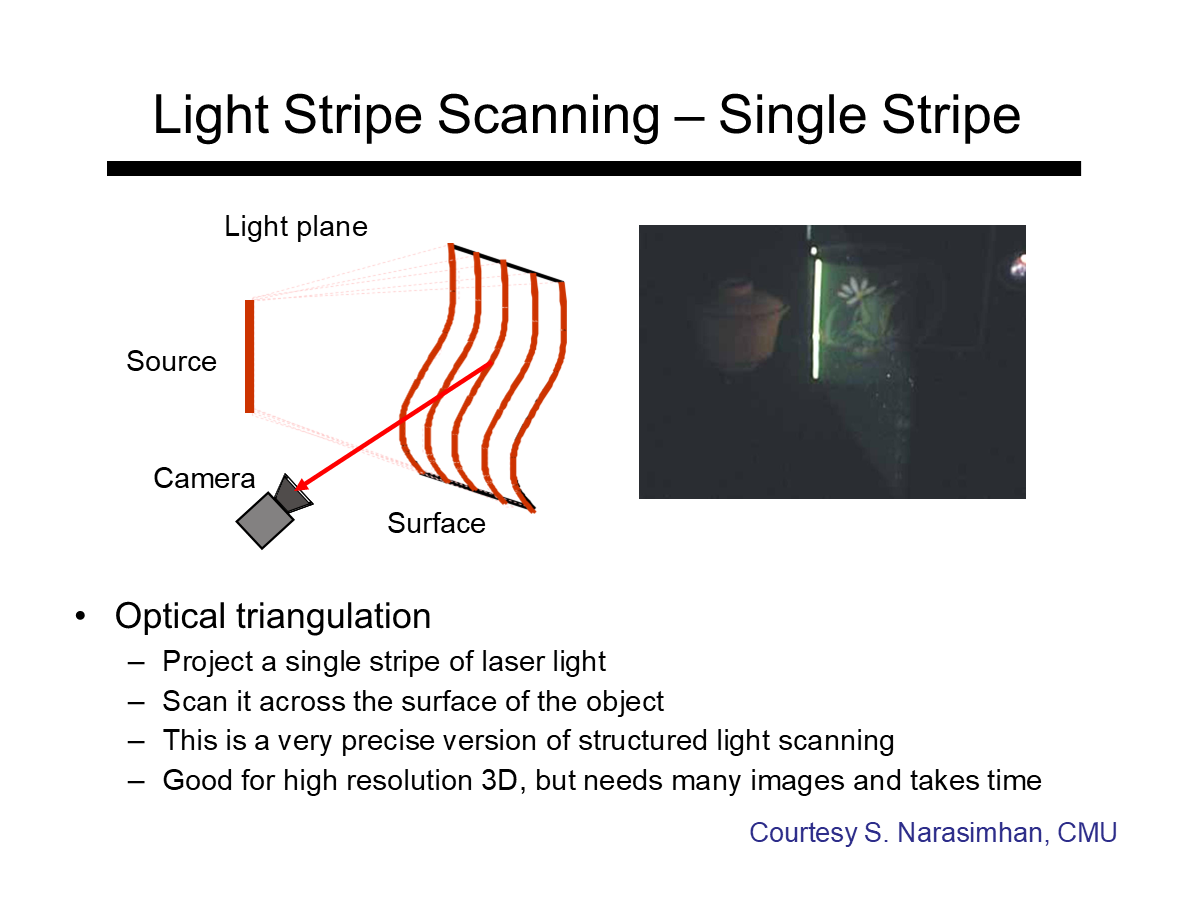
光帶掃描——單條
光學三角測量:
- 投射單個激光條
- 用它掃描物體的表面
- 這是結構光掃描的一個非常準確的版本
- 利於生成高精度的3D結果,但需要大量的時間以拍攝很多圖片
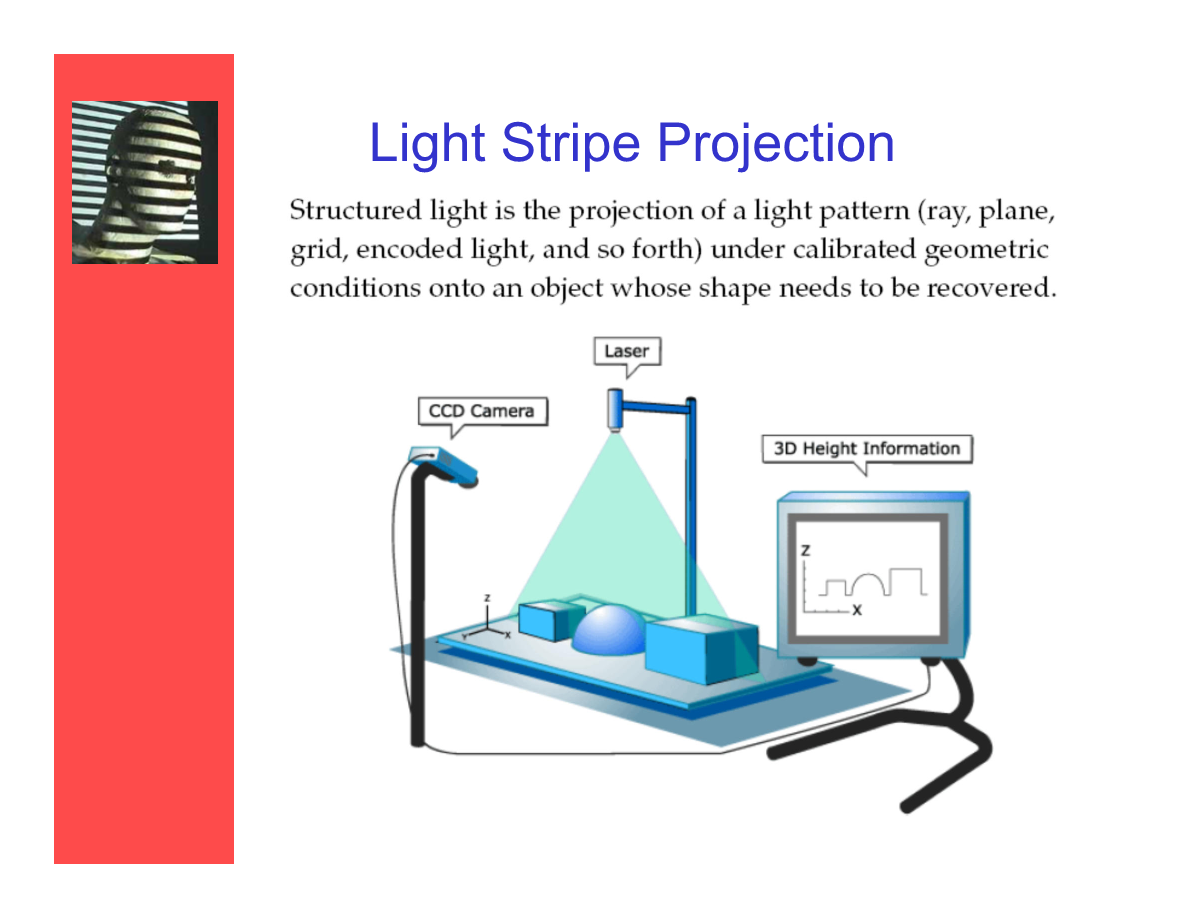
光帶投射
結構光方案是——在校準過的幾何條件下向目標物體投以一個光紋樣(射線、平面、柵格、編碼的光源、以及其它),並進行三維重建。
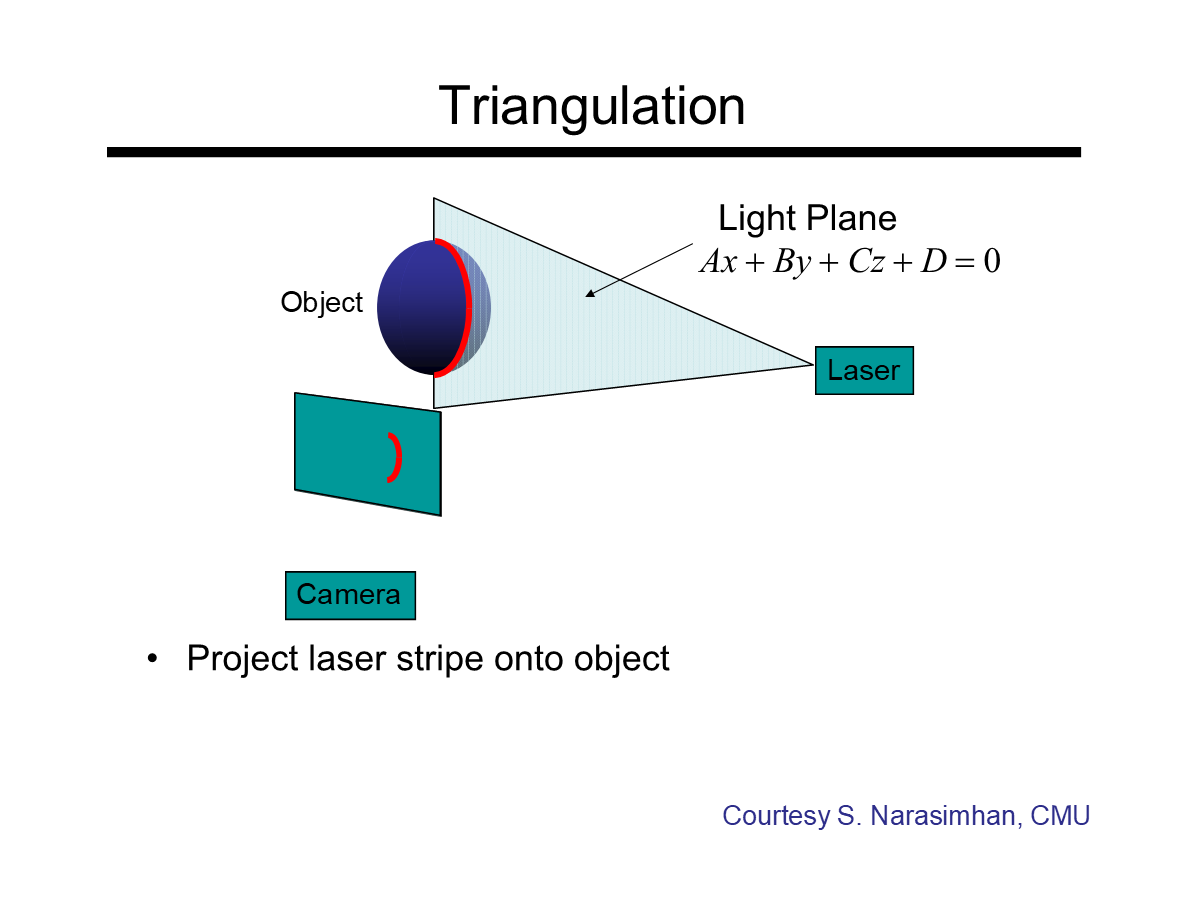
(結構光的)三角測量
*這個案例中激光發射出的是一個“光平面”,它會與物體表面相交投下光帶。平面的表達式如圖——基於攝像機光學中心為座標原點。
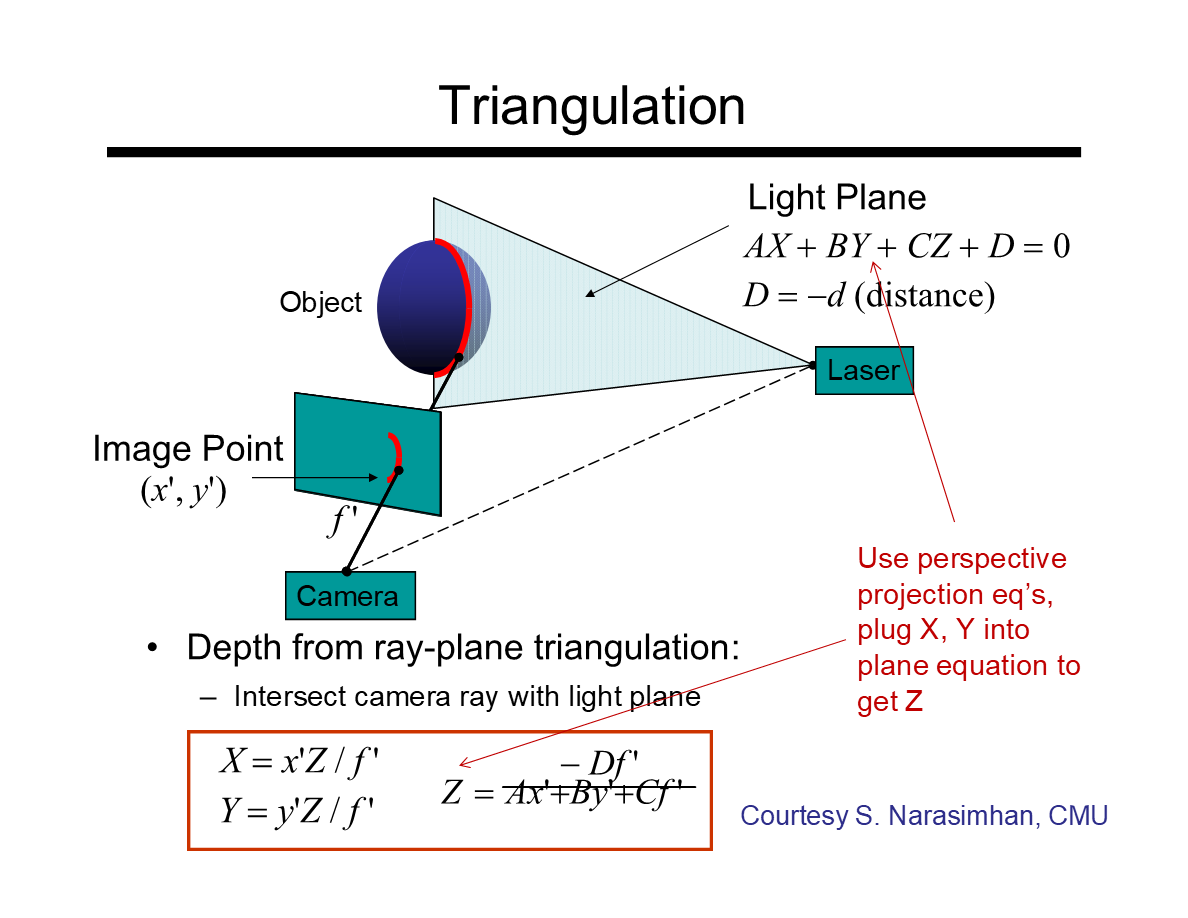
*圖中信息較多,這裡實際是要在已知一個投影點(x',y')及當前投影校準幾何相關信息的前提下,計算三維空間的深度——也就是Z值。
*對於一個點的情況,參照前一節提到的單點三維投射:X/x' = Z/f' = Y/y' 的結論仍是成立的,因此可以得到X、Y值基於Z的表達式(如圖)。
*D = -d。其中d是光平面到攝像機光學原點的距離。因為平面方程中ABC的幾何意義是平面的法向量,D可以理解成將平面移到座標原點的距離。
*將已知的x'、y'、f'、D、A、B帶入公式即可得出Z值(如圖)。在這種座標設置下,Z值就是物體上的點相對於攝像機的深度值。
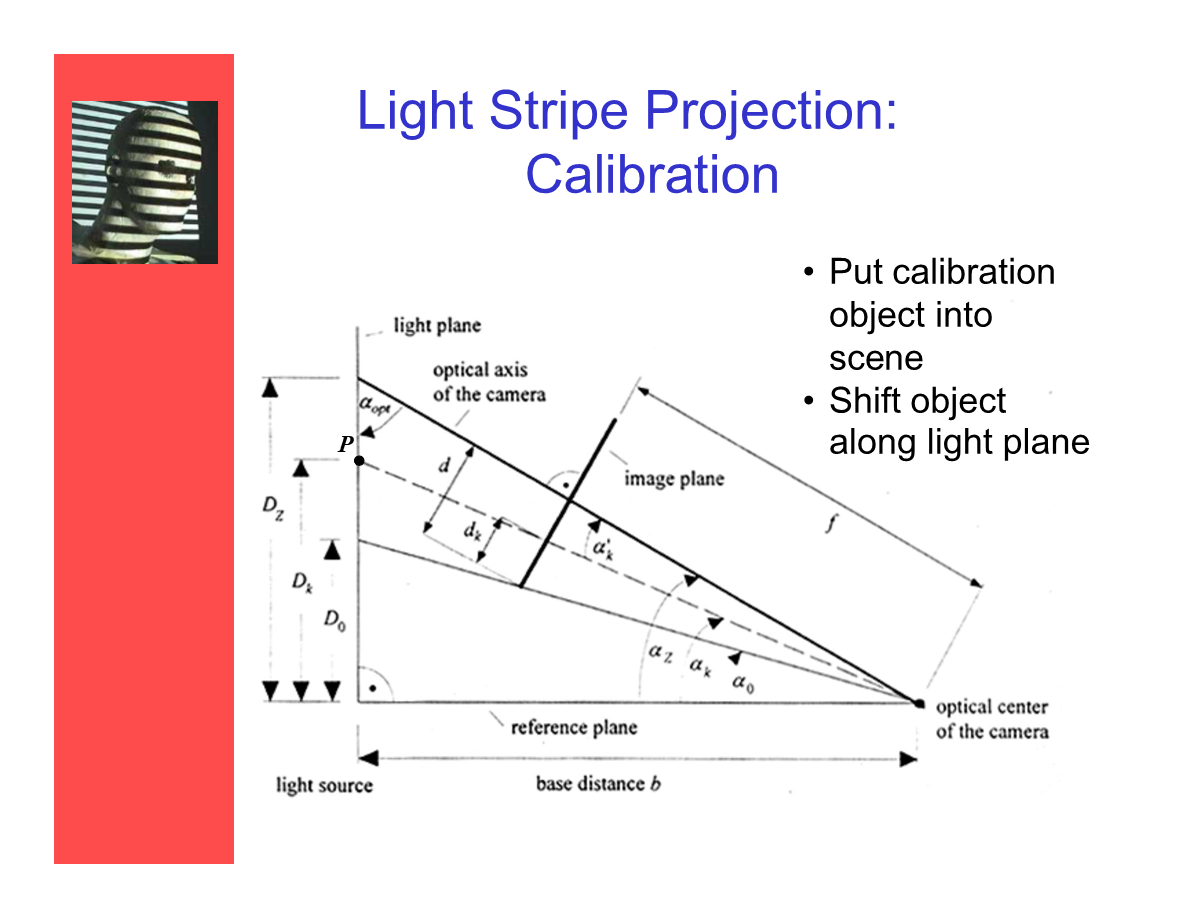
光條投射——校正
將校正物體放入場景,並沿著光平面平移。
*圖中從頂視圖展示了各個幾何關鍵點的位置關係。通過校準計算可以得出光平面相對於光學原點的平面參數。
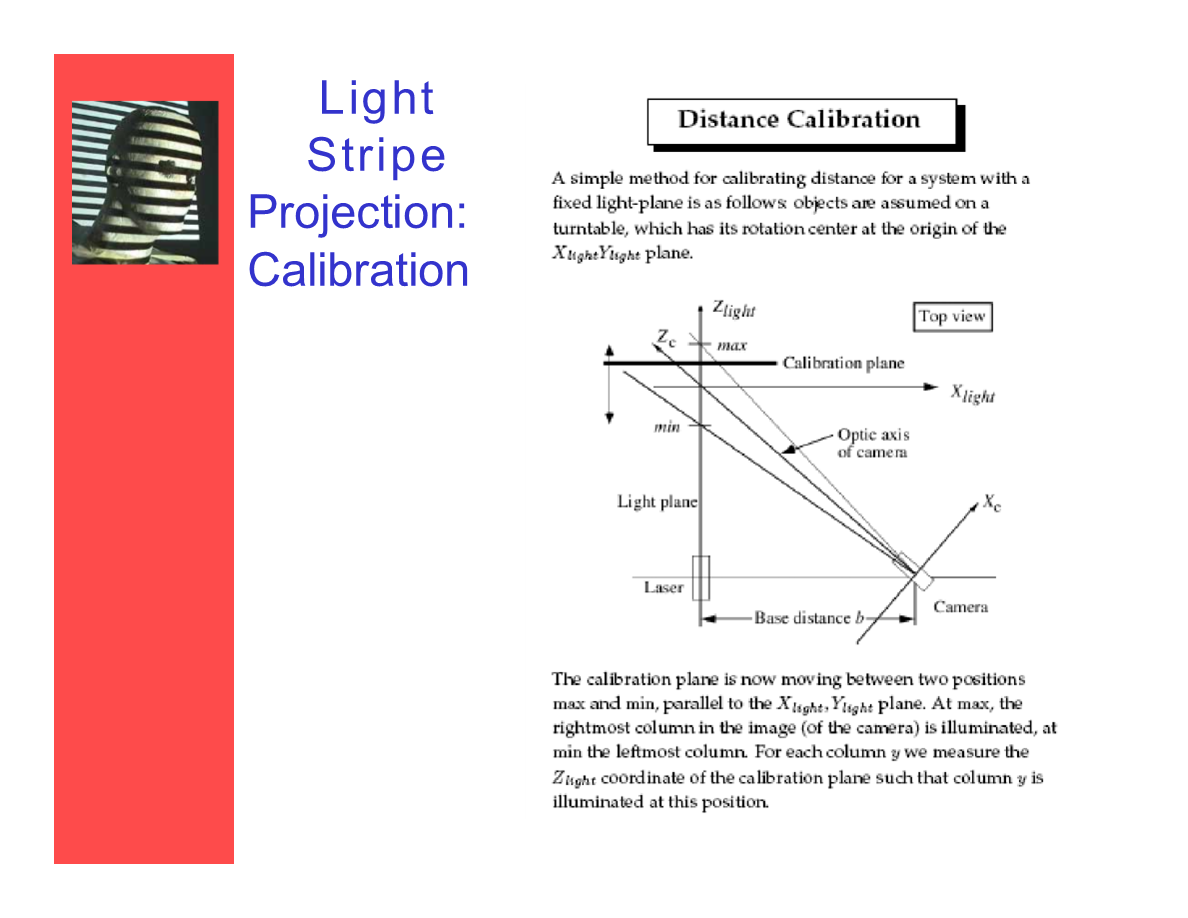
距離校正
要校準一個固定光平面的系統的距離,一個簡單的方法是假設目標物體在一個“轉盤”上,其旋轉中心是光平面的原點。
校準平面在兩點——max和min之間移動,與光平面平行。在最大值處,(攝像機的)圖像中最右側的列會被照亮,在最小值處則是照亮最左側的值。對於每一列y我們測量其在光學平面的Z值,這就是滿足y列被照亮的校準平面的座標值。
*這部分直接翻譯理解上可能有點抽象,其實旋轉和距離是兩個關切點。結合後面的例圖應該更好理解一些。
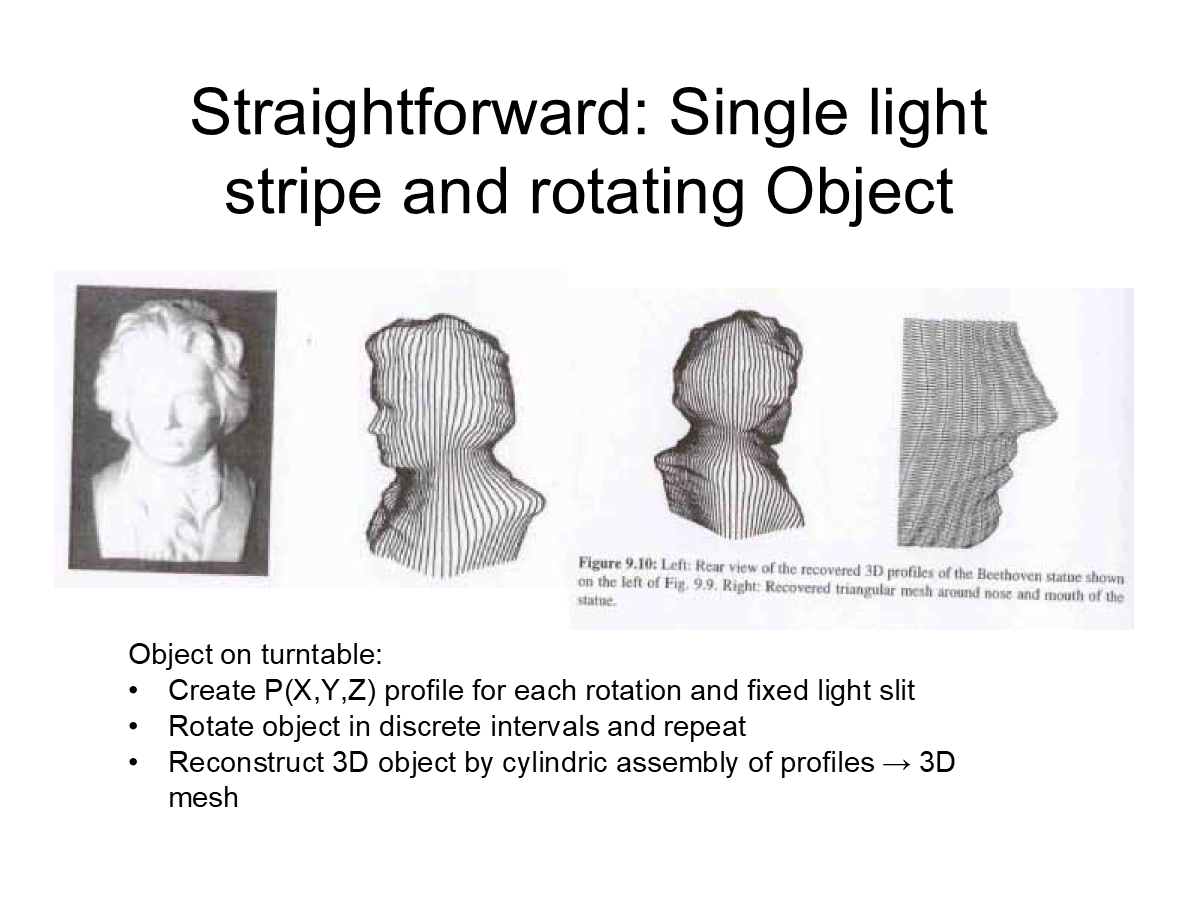
更直接的方法:單條光帶與旋轉物體
轉盤上的物體:
- 對每一個旋轉位置和光窄口(slit)創建對應的輪廓P(X,Y,Z)。
- 以離散的間隔旋轉物體,並重復這一過程。
- 以柱面方式集成輪廓信息,以重建3D物體——以3D網格的方式。
*注意這裡的多條紋是集成後的結果。
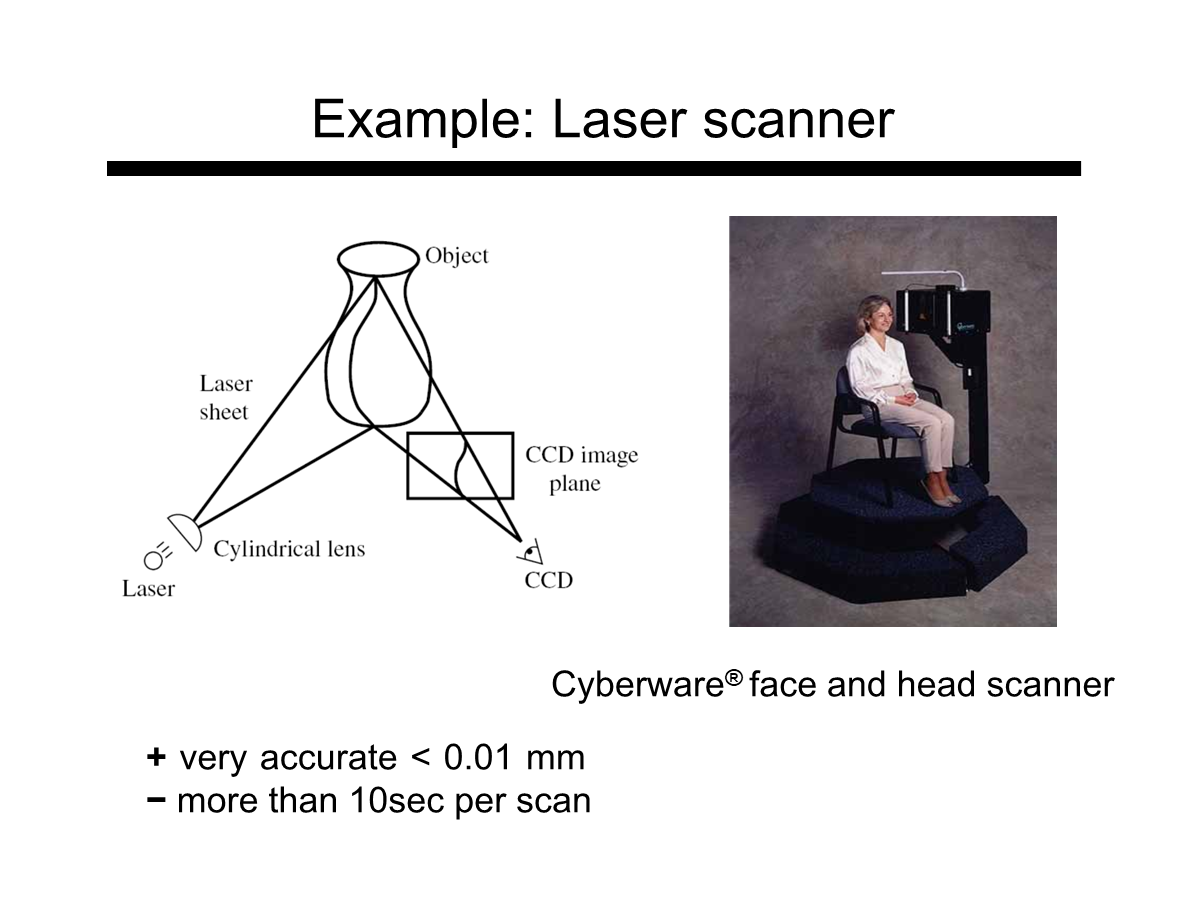
示例:激光掃描器
優點:非常精確,誤差在0.01毫米以內。
缺點:需要10秒以上時間完成一次掃描。
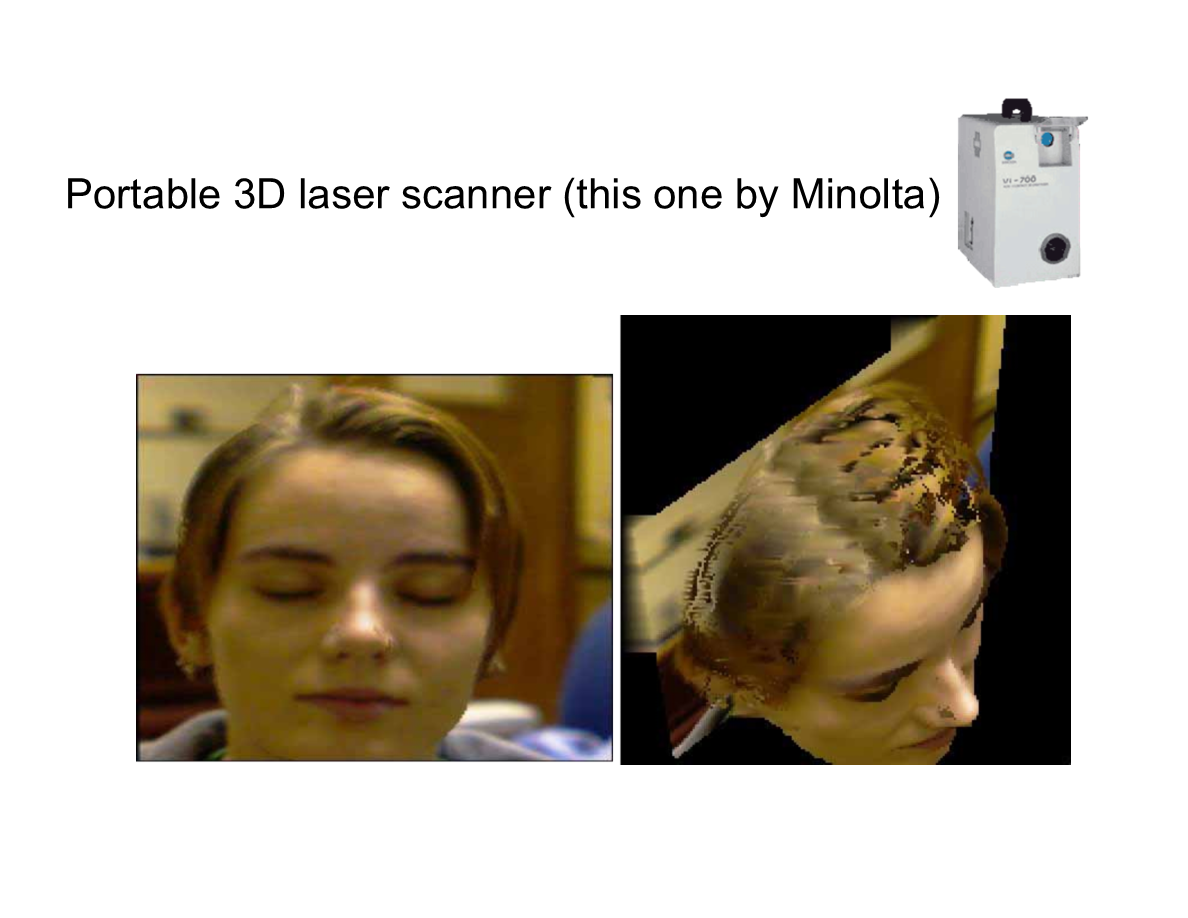
便攜式3D激光掃描器示例
四、3D拍攝與其它輕量級的方案
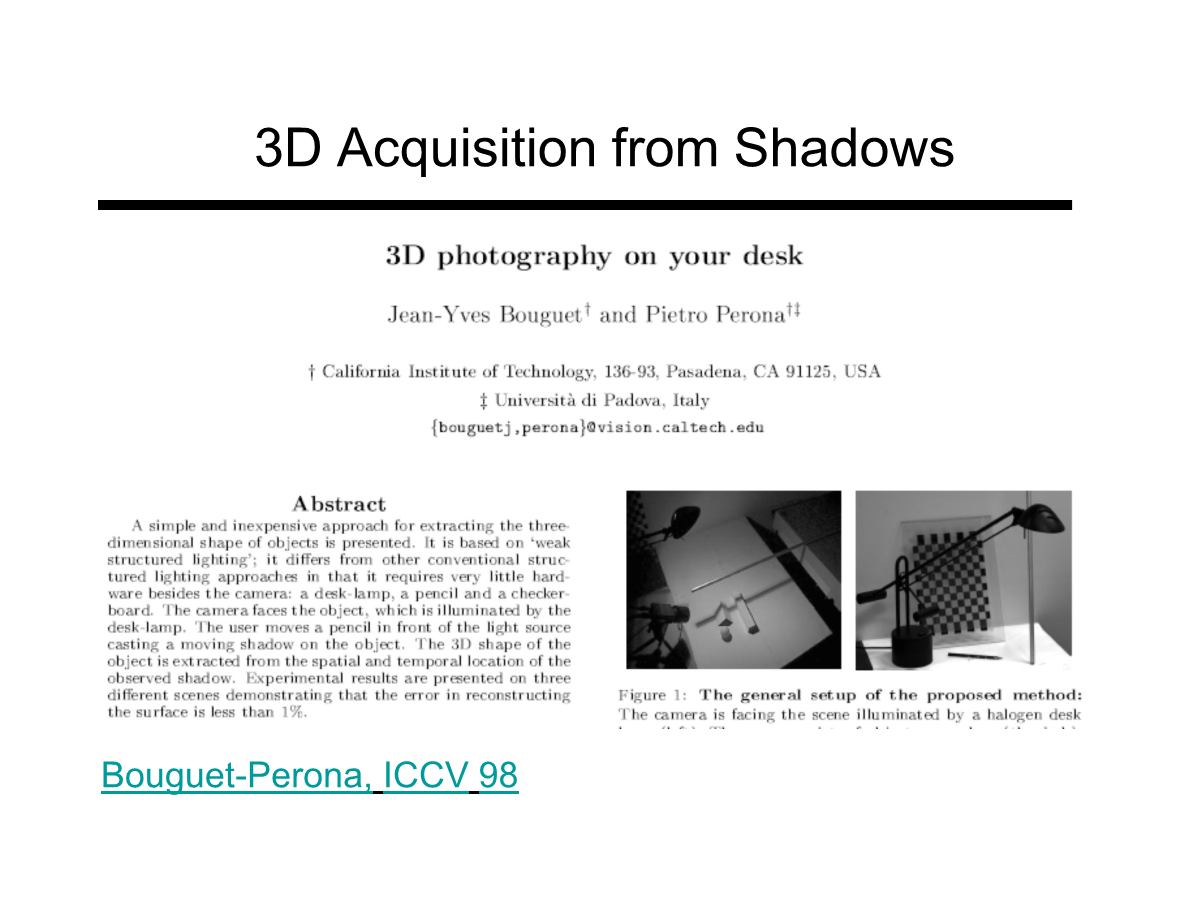
基於陰影的3D信息獲取
*這裡列出了這一節討論的內容的論文出處,有興趣的可以按需搜索。
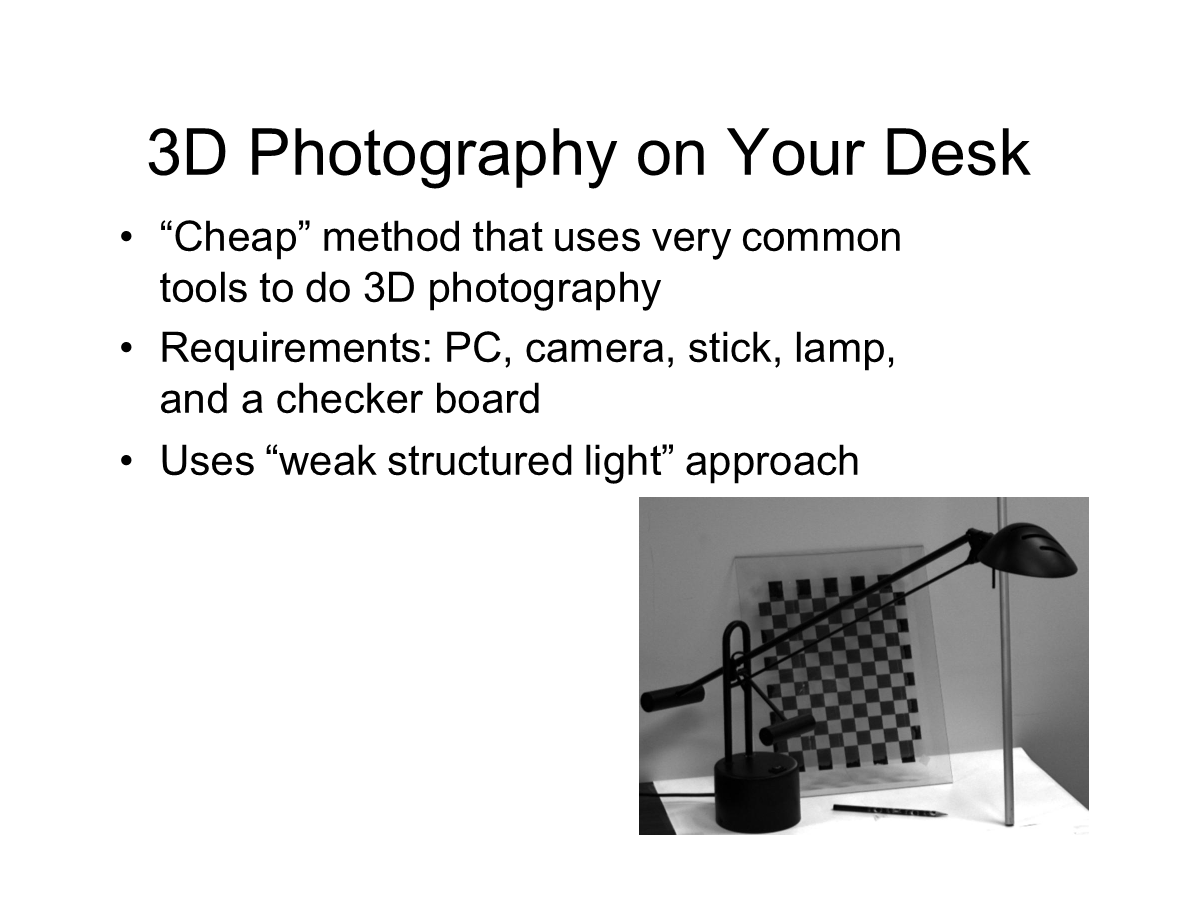
你桌邊的3D拍攝工具
- 使用常規工具以“便宜”的方案進行3D拍攝。
- 需要:PC、攝像機、棍子、檯燈、棋盤板。
- 使用“弱結構光”方案。
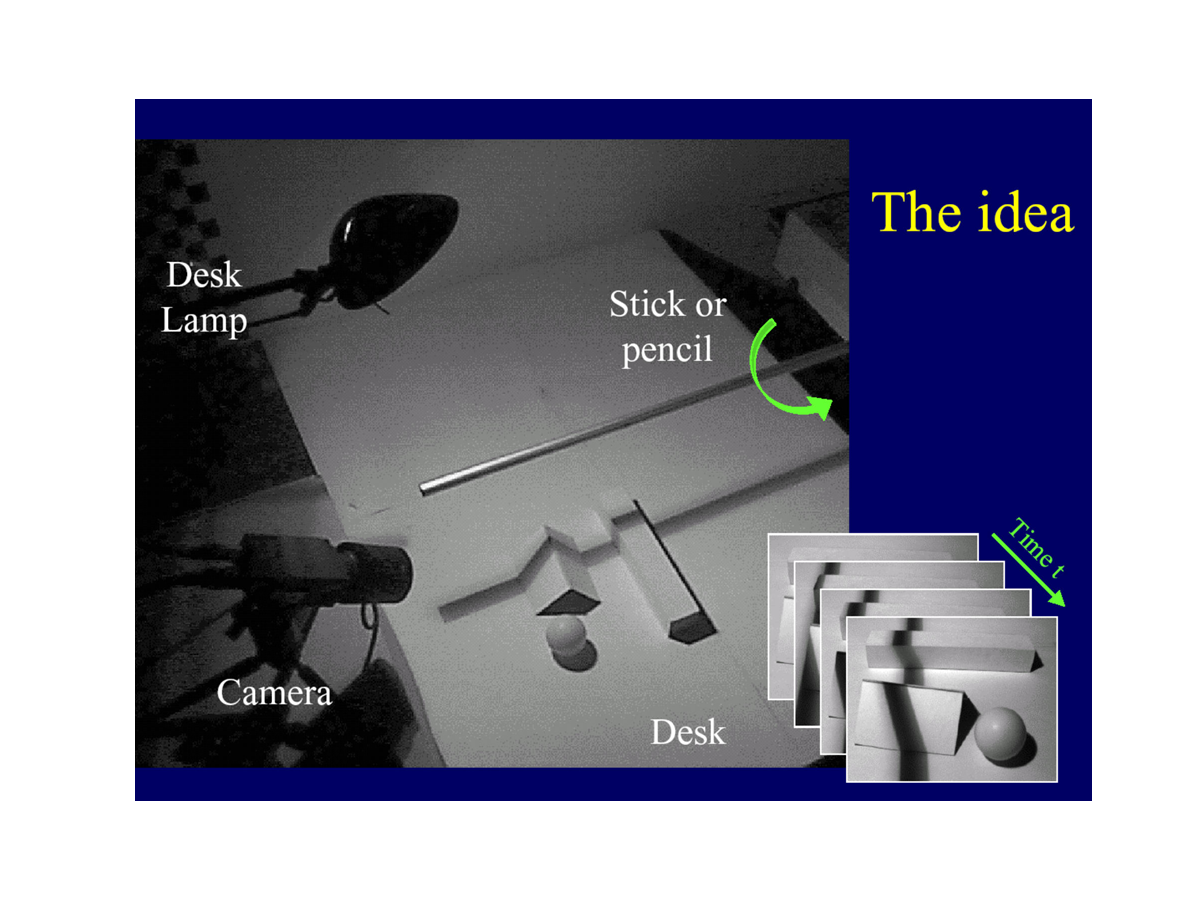
設備設置示意圖
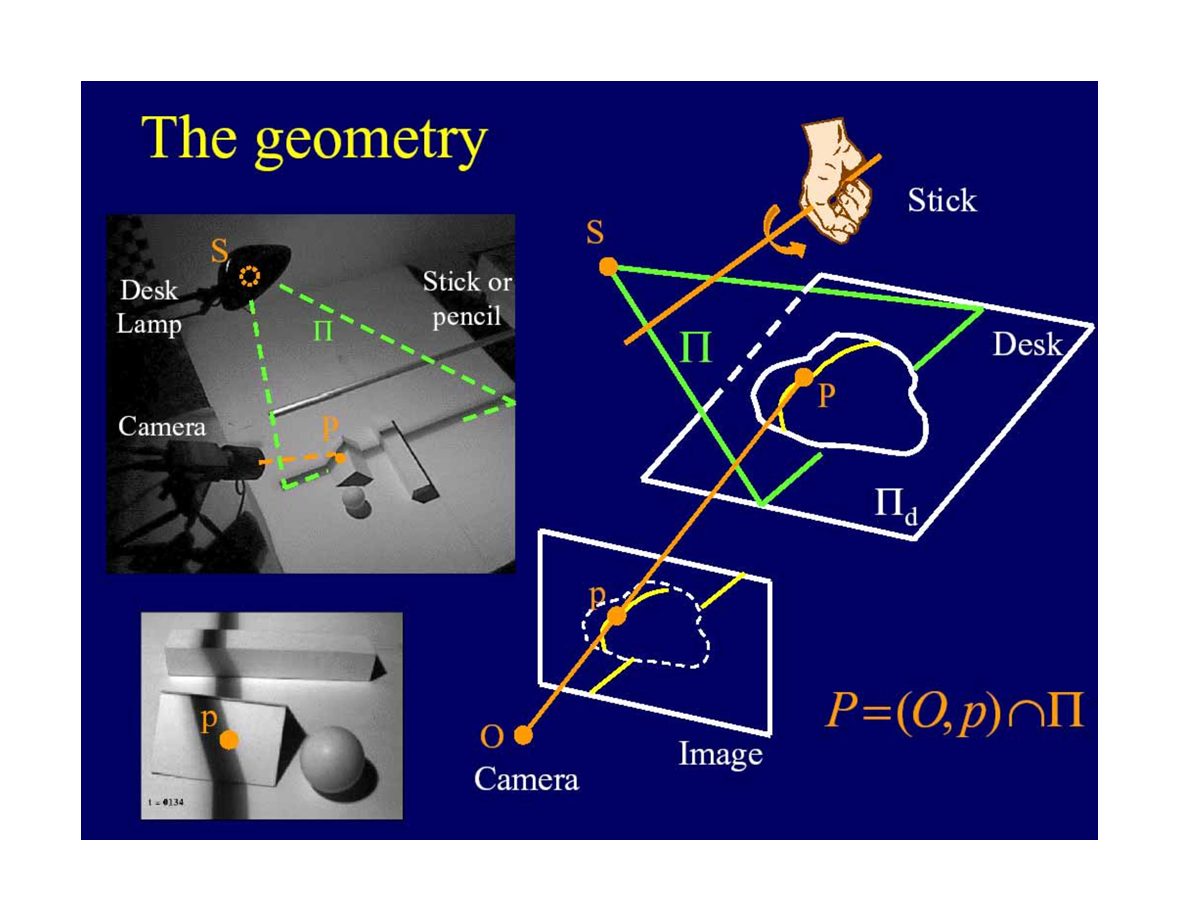
*可以看到,這裡的棍子的陰影起到了之前光帶的作用。
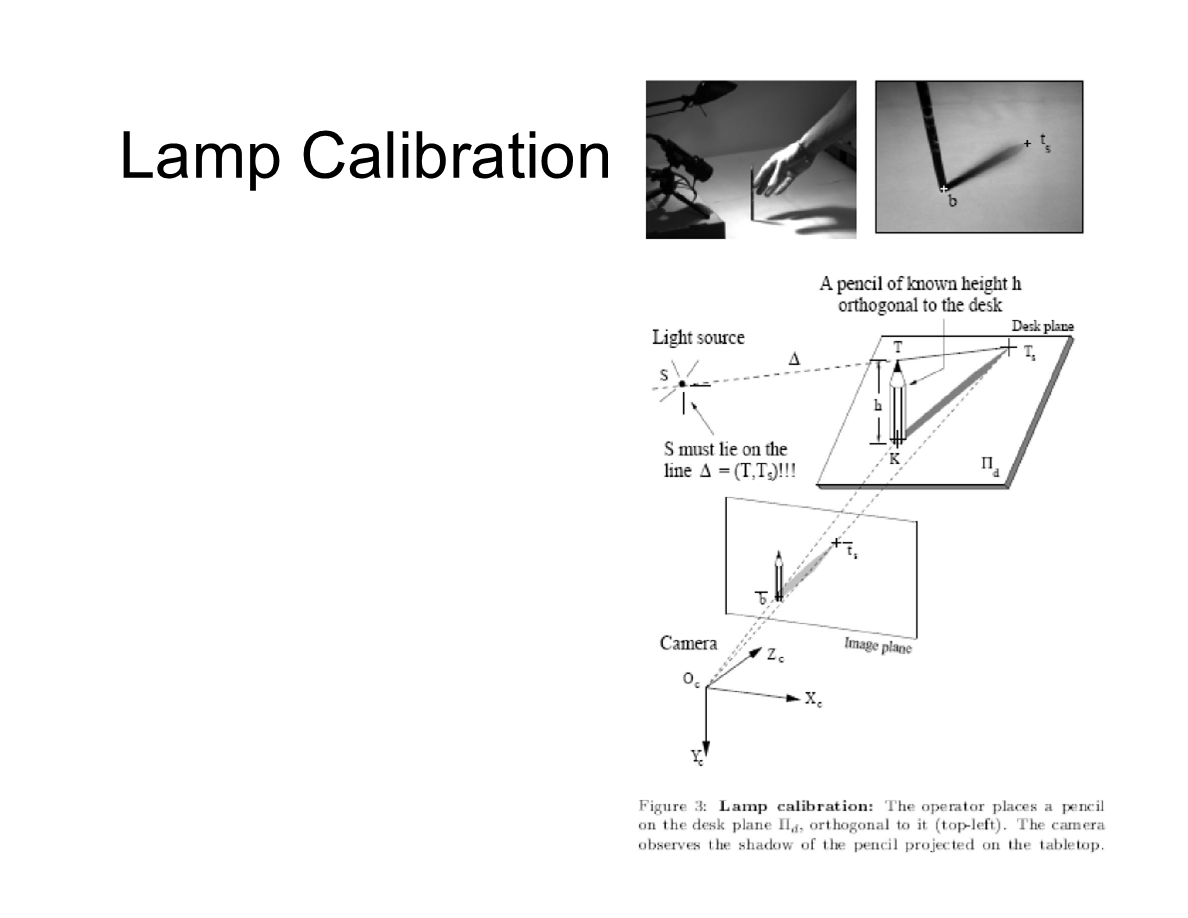
檯燈校準
檯燈校準:操作者在桌面放置了一根鉛筆,與其垂直。在攝像機中觀測鉛筆在桌面投下的陰影。光源中心S需要在T和Ts的延長線上。
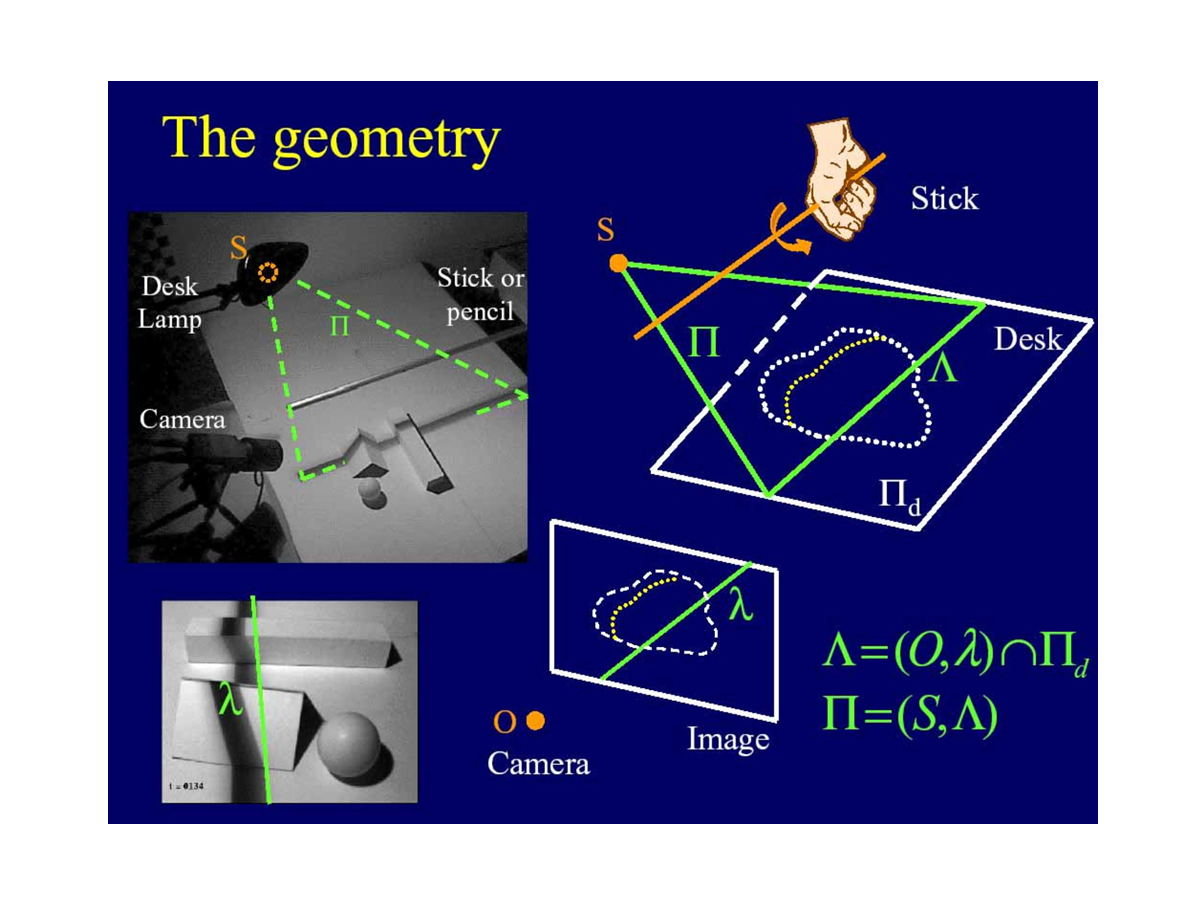
當棍子與桌面平行時
* ∩ 是相交的符號, Λ 是平面(O, λ)與 Π d的相交直線。
*Π是由S和Λ確定的平面。在確定了“人造光平面”後,問題就轉化為了前一節解決的問題。
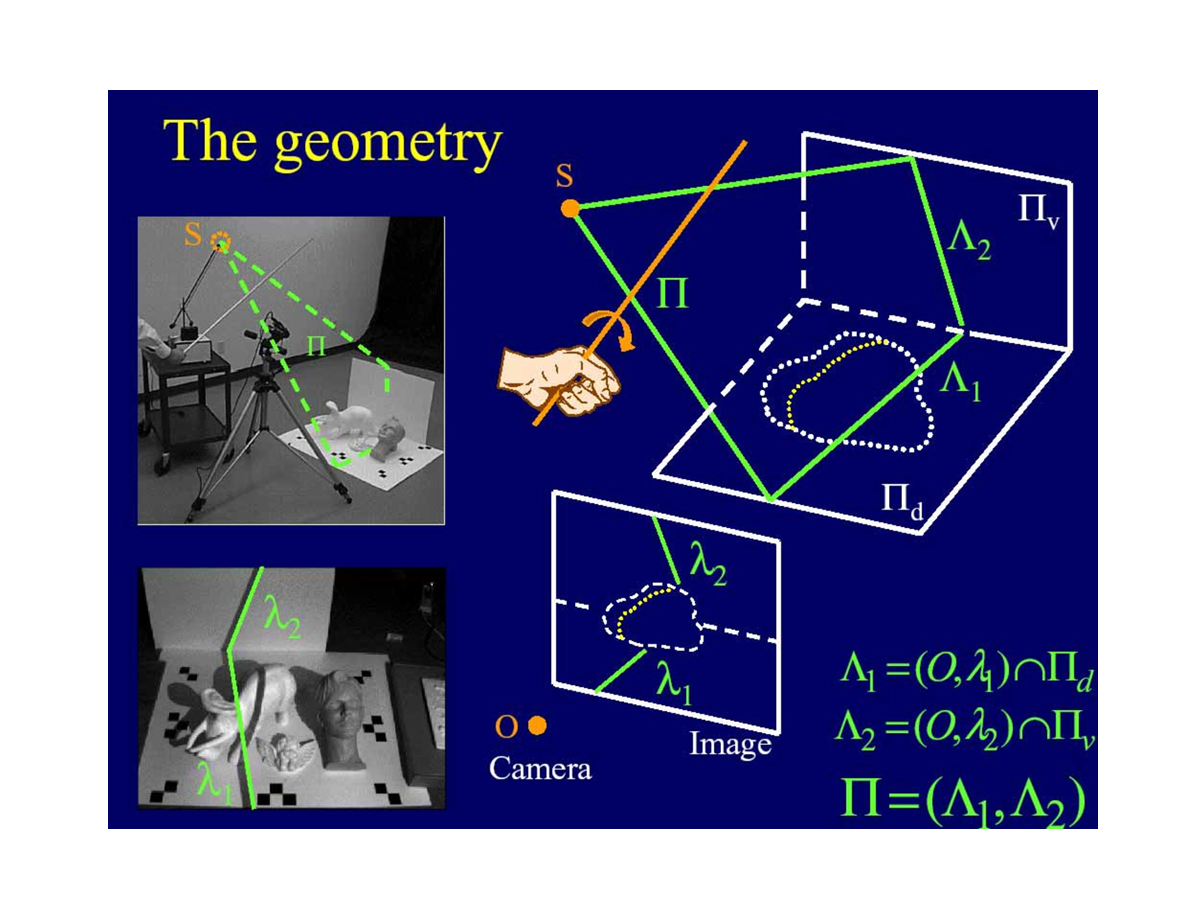
當棍子與桌面有角度時
*這裡額外引入了一個平面和一根線,最終用兩條相交線確認了平面Π 。推導方式和前一頁原理相同。
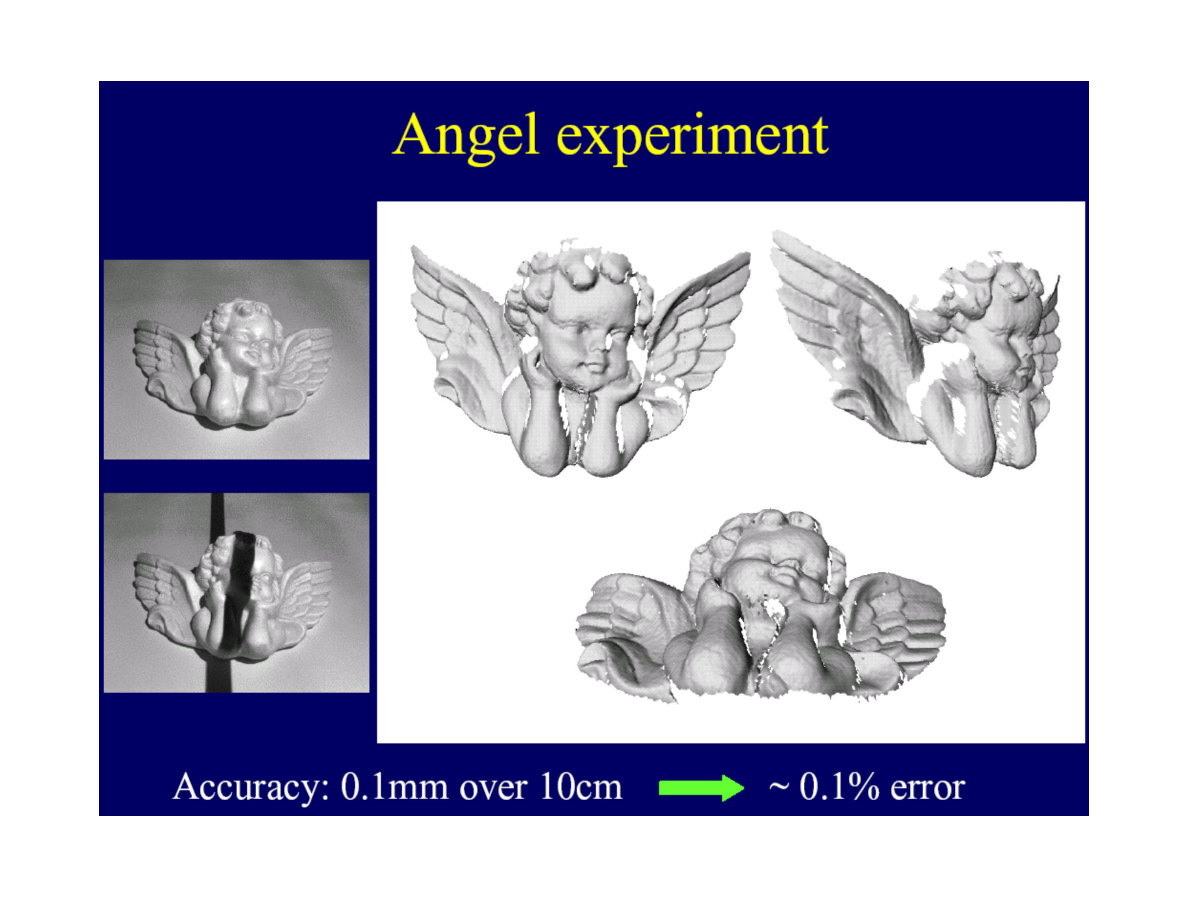
天使實驗
*從圖中可以看出,這種方法誤差是0.1%,但也有一些位置信息不能很好的確定——和陰影寬度有關。
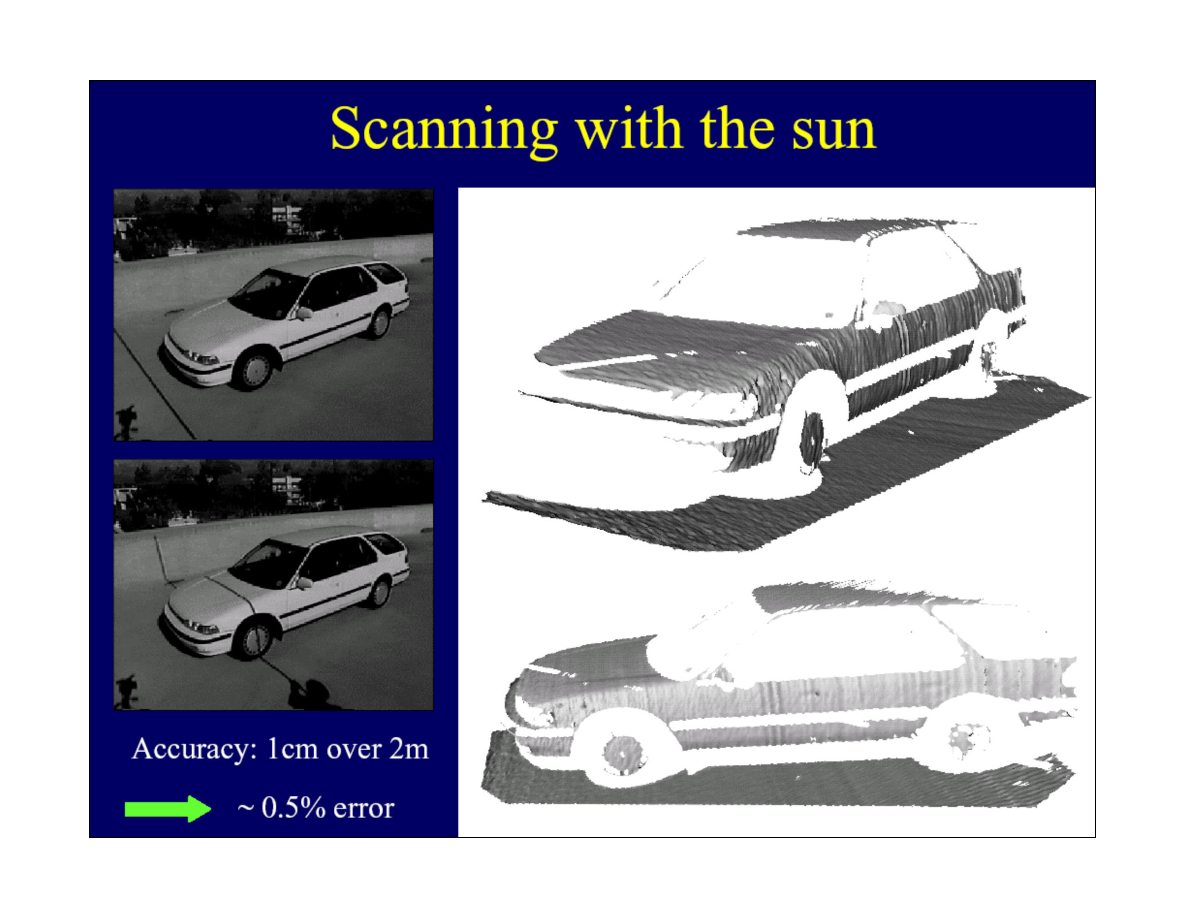
基於日光的掃描
*圖中雖然是黑白的,但是主要思路是用細棍在車身投影。誤差是 0.5% 。
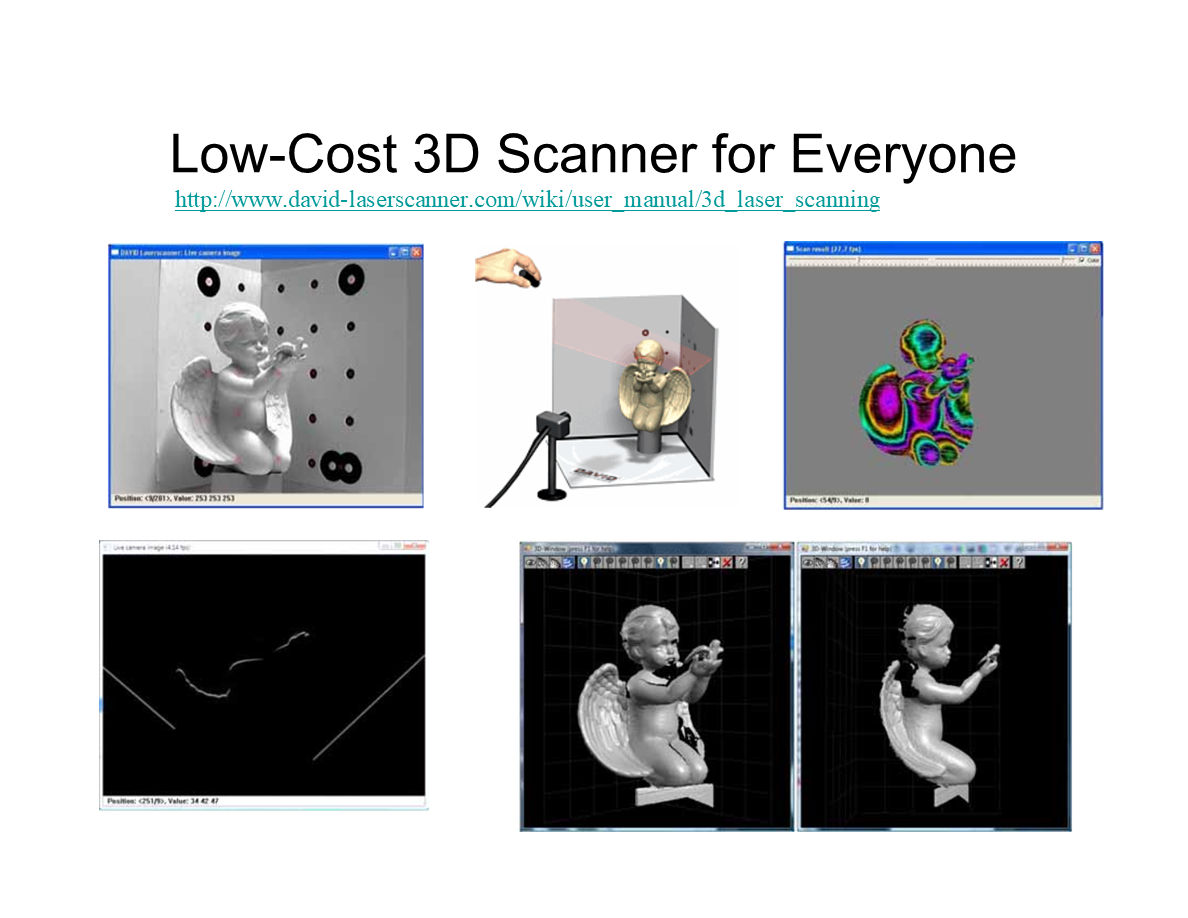
大家都能使用的低成本3D掃描器
*從圖中可以看出掃描小物體需要的設備尺寸及掃描情況。
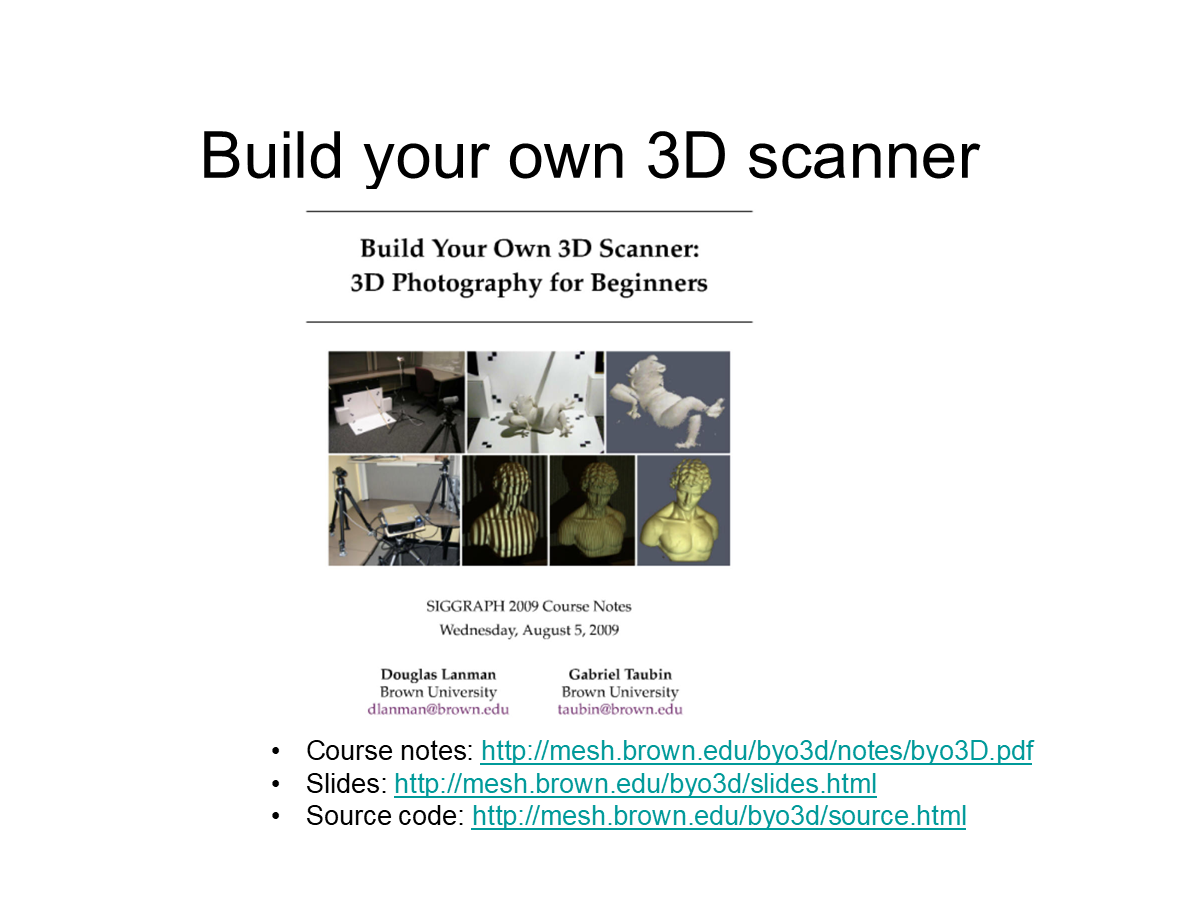
*圖中是2009年的一篇SIG文章,其中介紹了包括結構光在內的一些常見的3D掃描技術。
結語
通過粗讀這篇課件,我們瞭解了結構光方案作為一項“主動”方案在確定性及便捷性上的優點。在本篇的最後停在了光帶(或人造陰影條)進行掃描測量的部分,涉及的計算沒有超出立體幾何的範圍。
這個系列兩篇文章的下一篇會介紹以“編碼紋樣”進行結構光掃描的方案(Pattern encoding/decoding),相對會更難理解一些,但確實也是提升結構光方案效率的必經之路。
下面是資料鏈接:
Structured Lighting Guido Gerig CS 6320, 3D Computer Vision Spring 2015