前言
这周继续读三维重建方面的技术向课件。按照之前的大纲,这次读到前AI时代中,计算机视觉方面的一项技术——
Structured Light(结构光)。这项技术作为立体视觉之后提出的一项技术,其理解跨度相对不算大。
简单来说,这是一项用激光等光源投在物体表面、再用相机等设备进行采样的技术,注重还原物体的三维结构。
介绍结构光的论文其实也很多,但作为个人能全部仔细读完以及图文搭配合适的内容,这次我选择了UTAH于2015年的计算机视觉课件。和之前一篇比较长的PPT拆分成上下两篇不同,这次这个课题下的课件本身就有两篇——因此这次粗读的是两篇中的第一篇完整部分;下周则会读第二篇。
由于没有课件文稿,因此PPT部分以翻译为主,打星号的部分是我的个人理解或补充,主要是对课件中一些值得展开介绍的部分补充分析或外部信息。
一、引入与概述
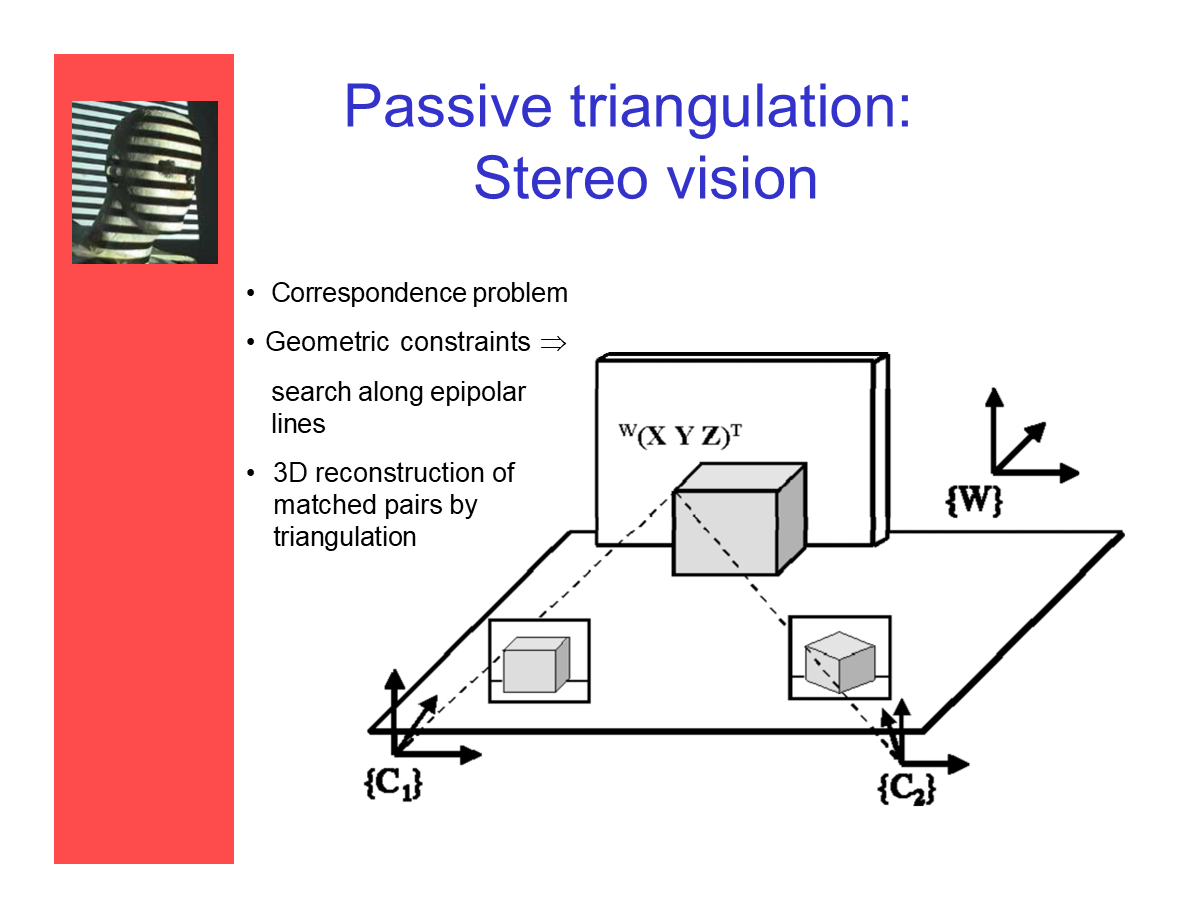
被动三角测量:立体视觉
- 对应点问题
- 几何约束——沿着极线查找
- 基于匹配点的三角测量进行三维重建
*基本上概括了立体视觉部分的基本思路,细节的一些矩阵计算在上次读的部分也介绍了。
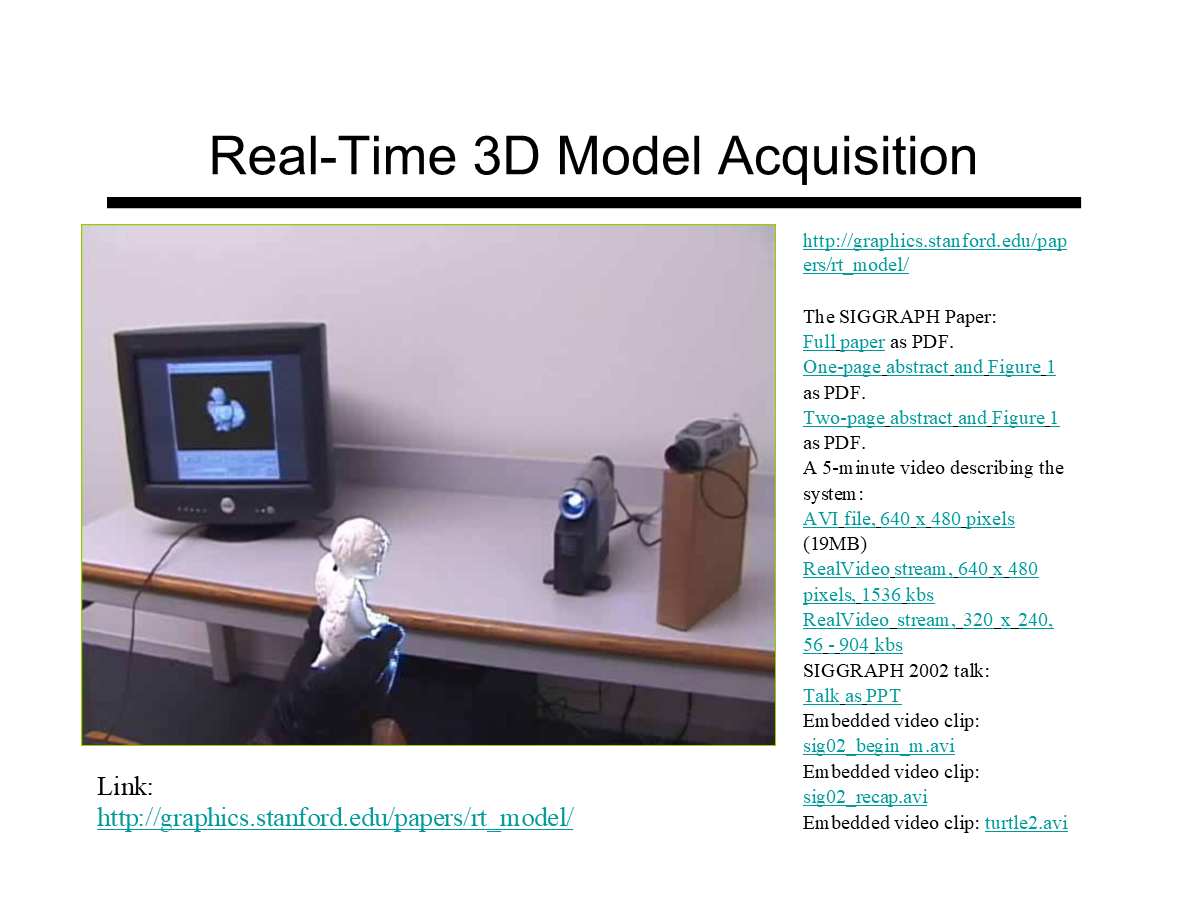
实时3D模型获取(重建)
*这里面提到了很多演示和链接,文末会附整篇课件的原文。虽然当时的一些设备还相对比较简单,但也反映出了这项方案的最小可运行规模。
结构光
——基于摄影测量的主要问题:
- 为从多个视图中还原场景物体的形体,我们需要找到图中的对应点。
- 这一匹配(对应)问题是很难的。
- 没有较好定义过的图像点集,就无法在图像域中还原3D物体的几何结构。
——结构光方案:
- 理念:通过同构(相似)的点集合,找到一种方式来简化匹配和确保获知密度覆盖信息。
- 基本策略:使用照明设备来人为创造对应点。
- 或许是实践中最为稳固(鲁棒 robust)的方案。
- 被广泛使用(工业测量、娱乐产业...)。
- 也被称为“动态立体视觉”或“白光扫描”。
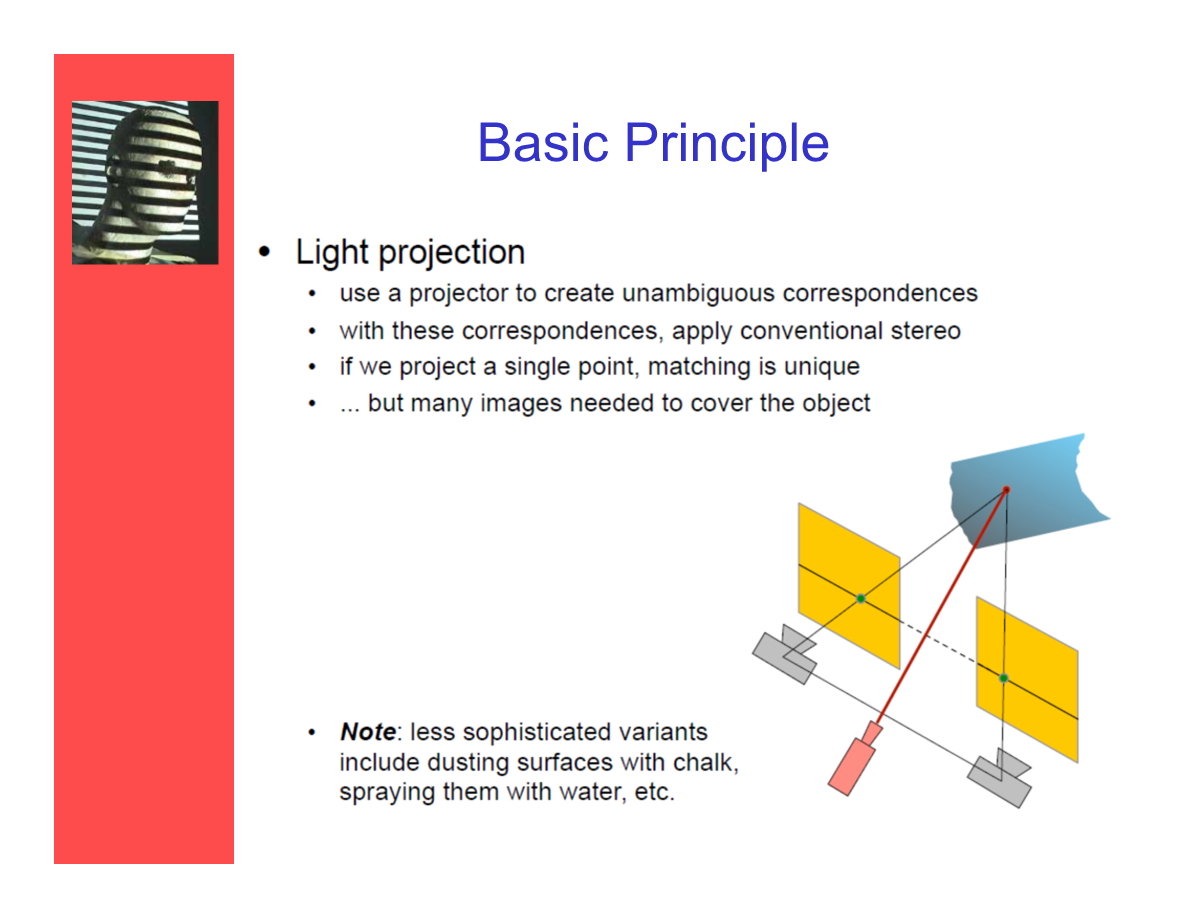
基础原则
——光投射:
- 使用一个投射器来创造无歧义的对应关系。
- 通过这些对应关系,应用常规的立体(视觉)。
- 如果我们仅投射一个点,则匹配结果是唯一的。
- ...但这样要覆盖一个物体则需要太多图片。

特殊情况:光点立体视觉
图中:基于基本的光点立体解析的常规设备设置方案。
校准相机:通过左右侧摄像机的探测以完全确定点的3D位置。光点扫描跨越整个场景。
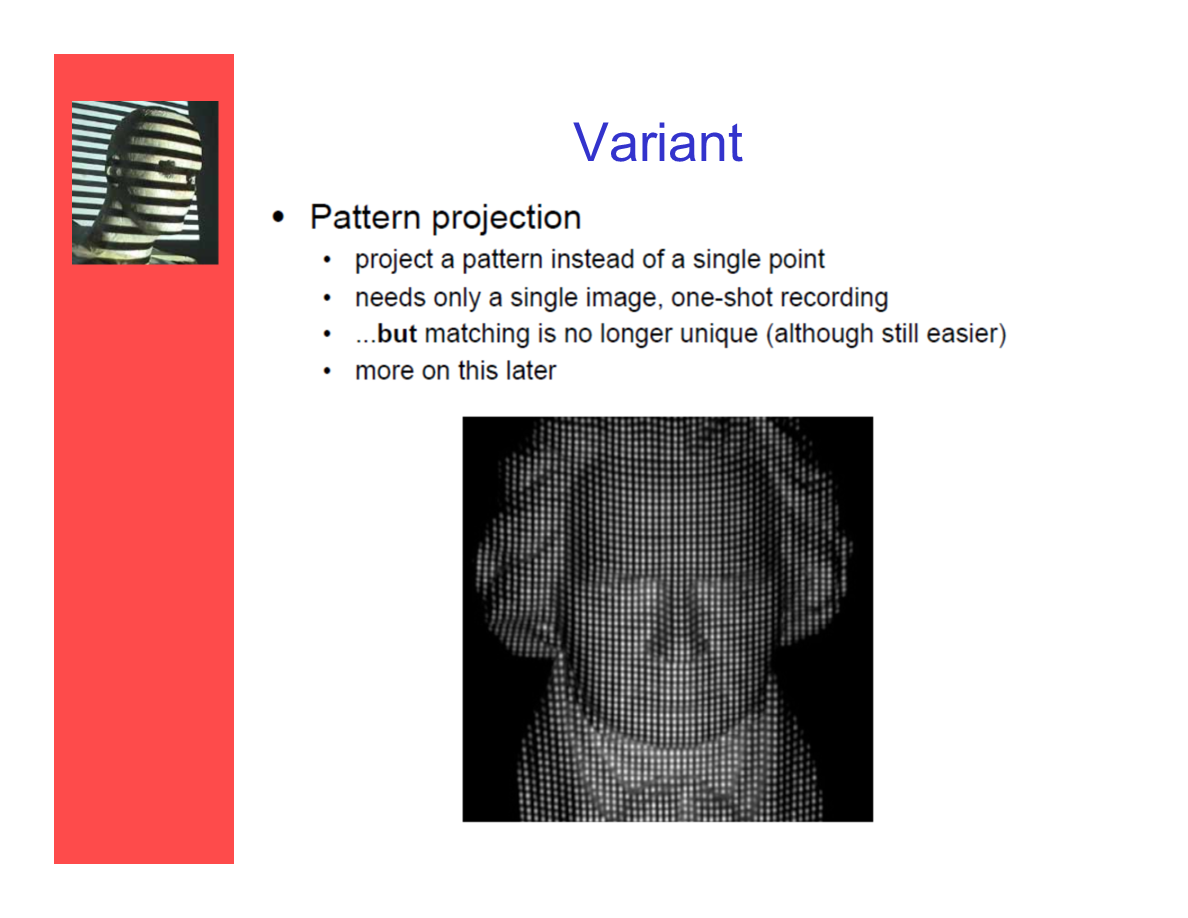
变体应用
——纹样投射:
- 投射一个纹样而不仅是一个点。
- 只需要一张图,记录一次拍摄。
- ...但是匹配结果可能不再是唯一的(尽管还是足够简单)。
- 后续(第二篇)会展开介绍。
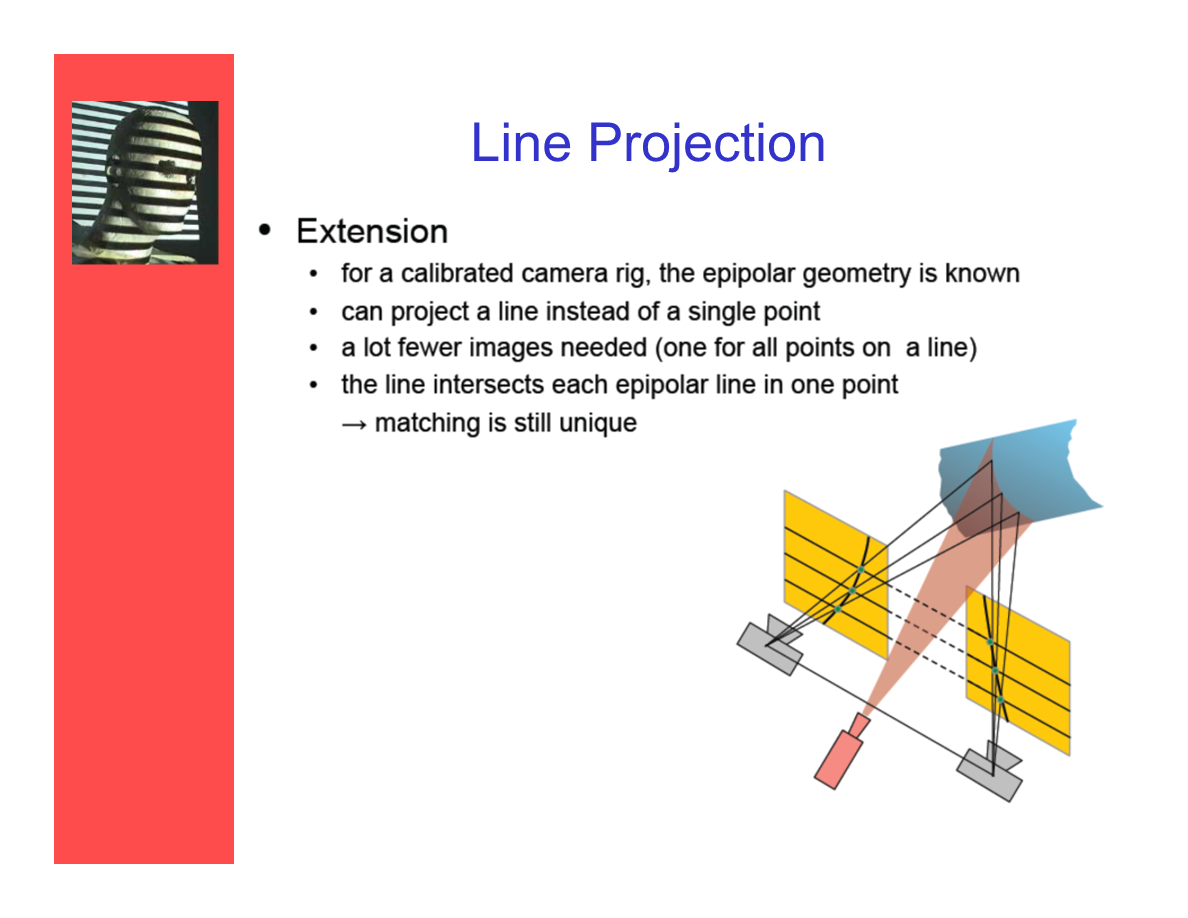
线投射
——扩展:
- 对于一个校准摄像机装置,它的对极几何(固有属性)是已知的。
- 可以投射一条线而不是一个点。
- 需要相对更少的图片(每条线上的所有点一张)。
- 扫描线与极线在一个点相交——匹配结果仍然是唯一的。
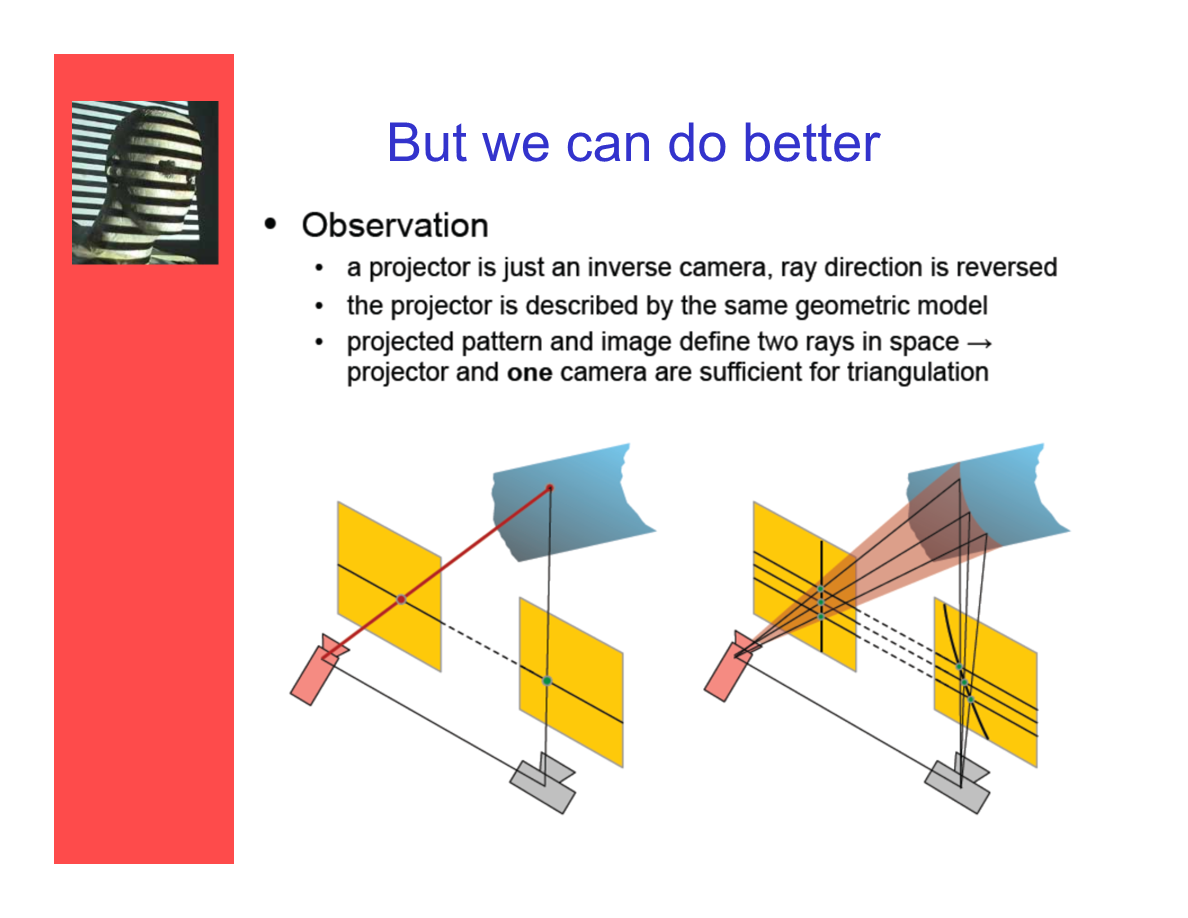
但我们能更进一步
——观察:
- 一个投射器可以理解成一个“逆摄像机”,射线的方向是逆向的。
- 投射器被以(和摄像机)相同的几何模型来描述。
- 投影纹样和图像定义了空间中的两条射线——投影器和一台摄像机就足够进行三角测量了。
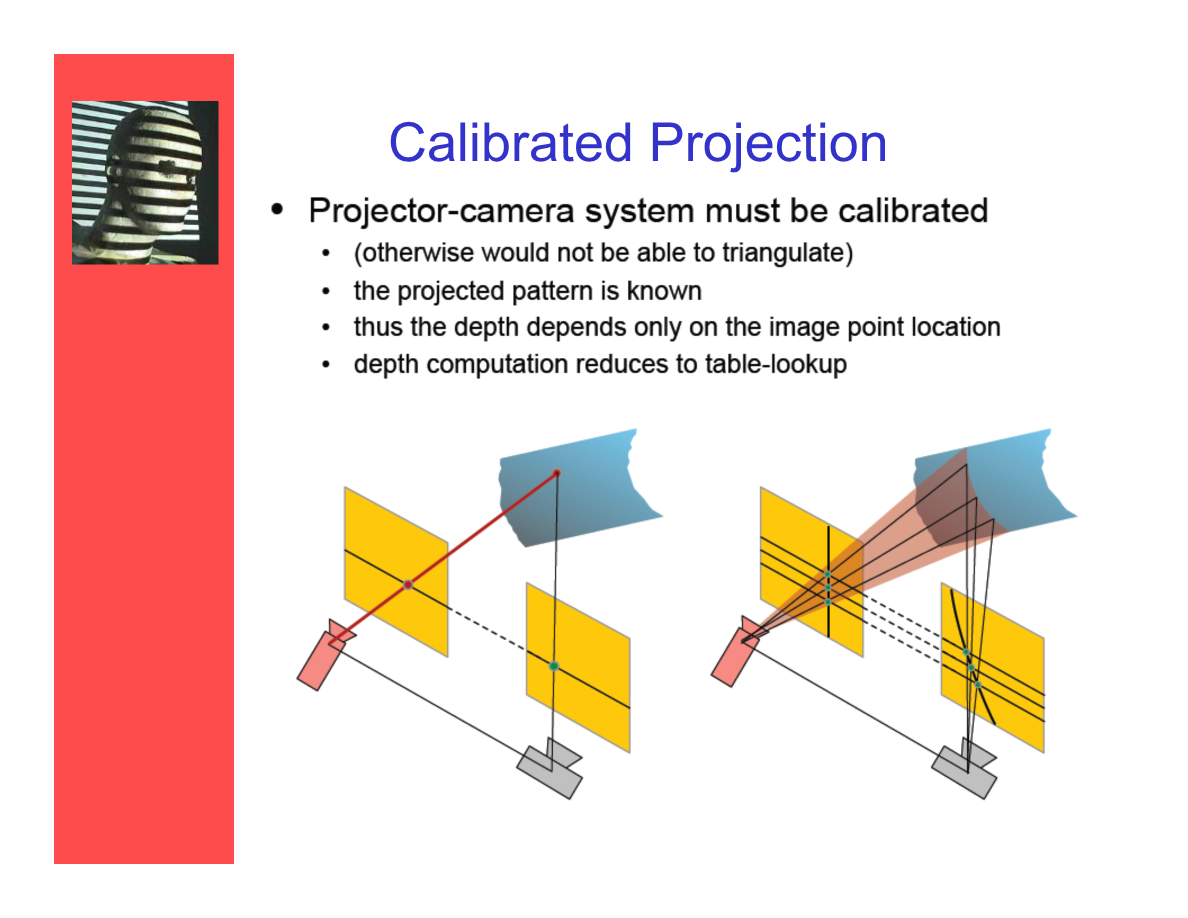
校正投射
——投射摄像机系统必须经过校正:
- (否则无法进行三角测量)。
- 投射纹样是已知的。
- 因而深度计算仅依赖于图像上点的位置。
- 深度计算能简化成查表的过程。
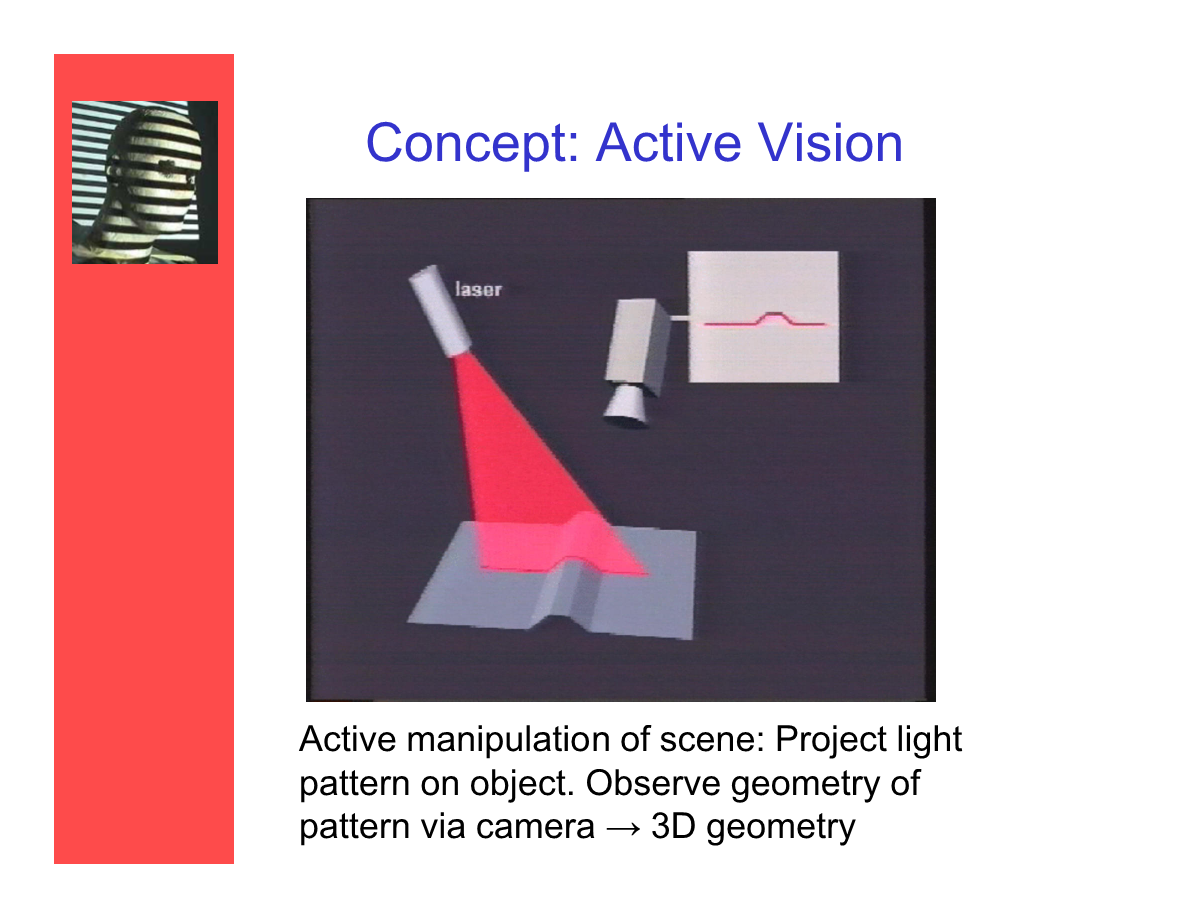
概念:主动立体视觉
主动对场景做操作:对物体投射光纹样——通过摄像机观测纹样——还原3D几何。
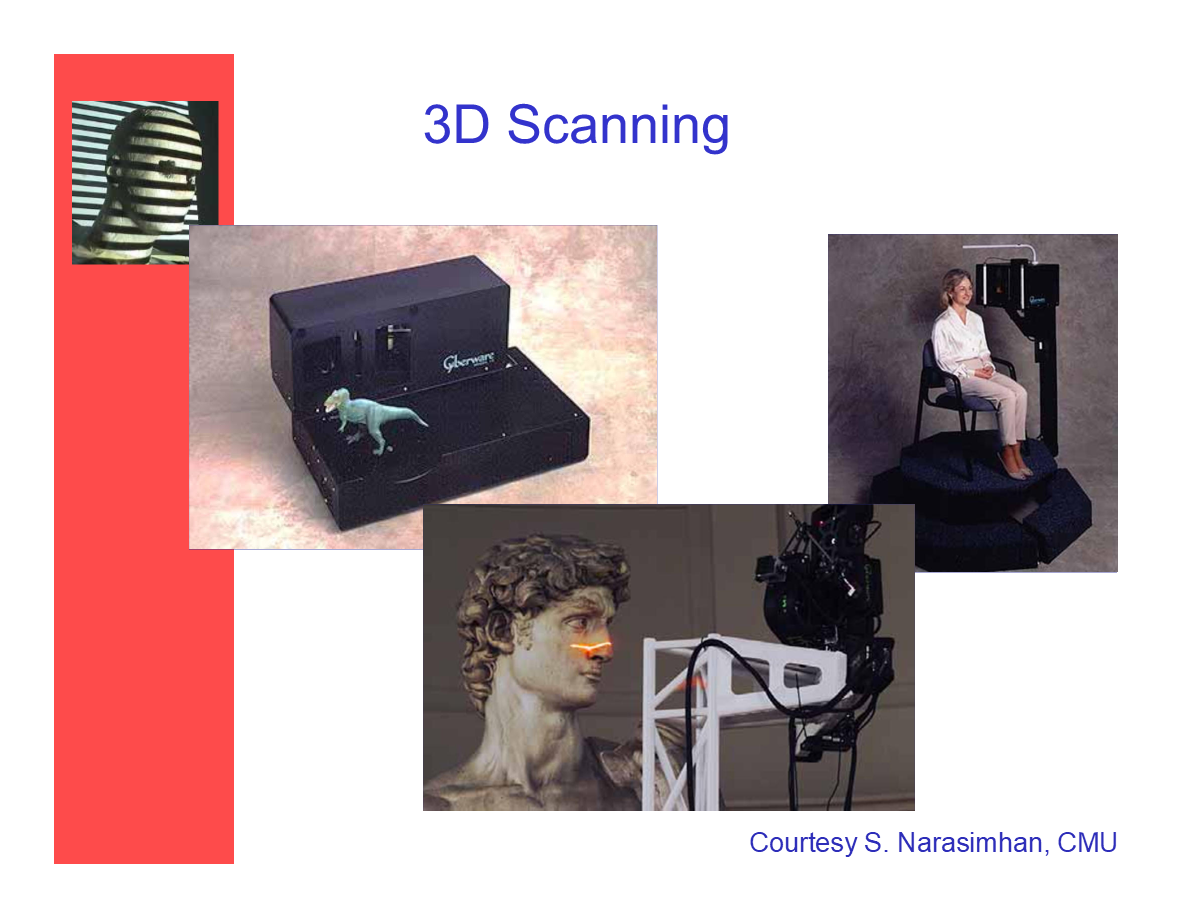
主动3D扫描的一些案例
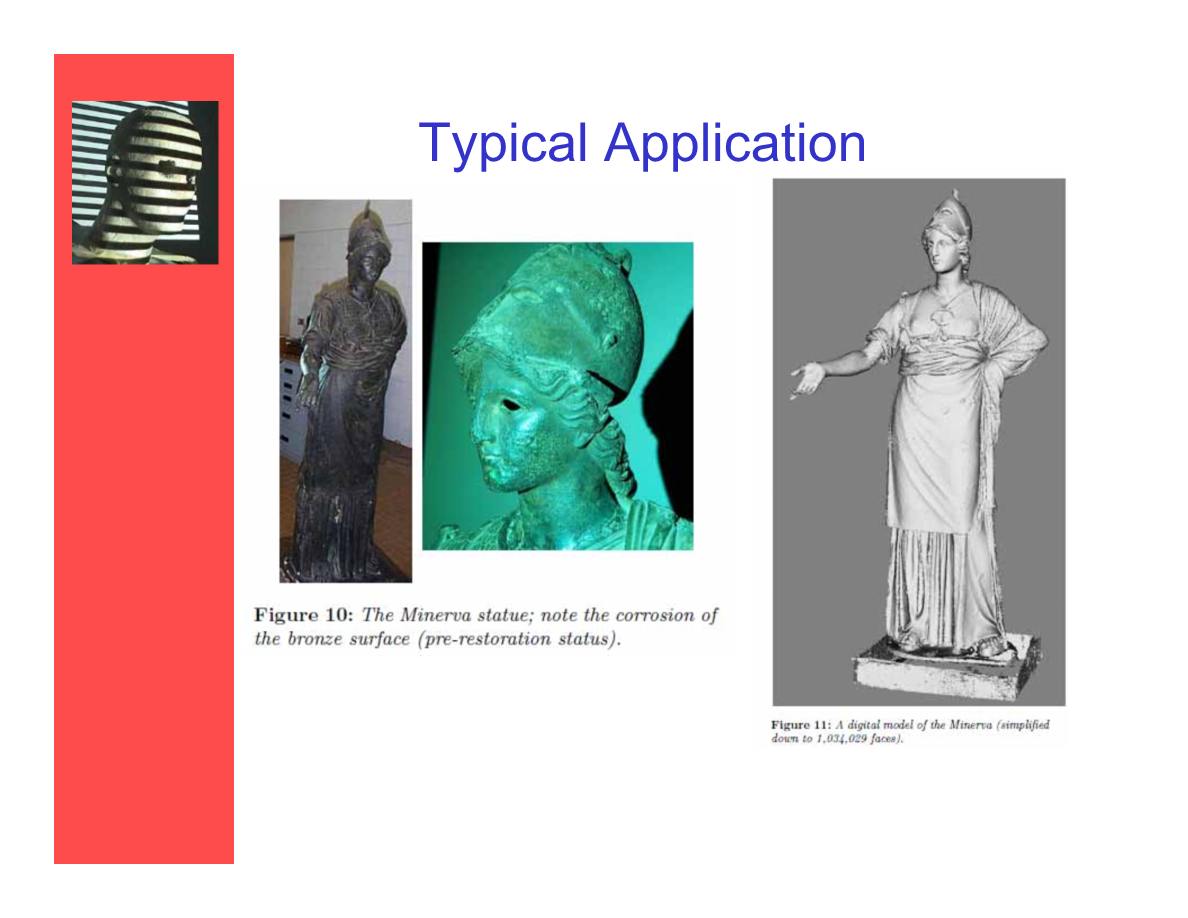
典型的应用
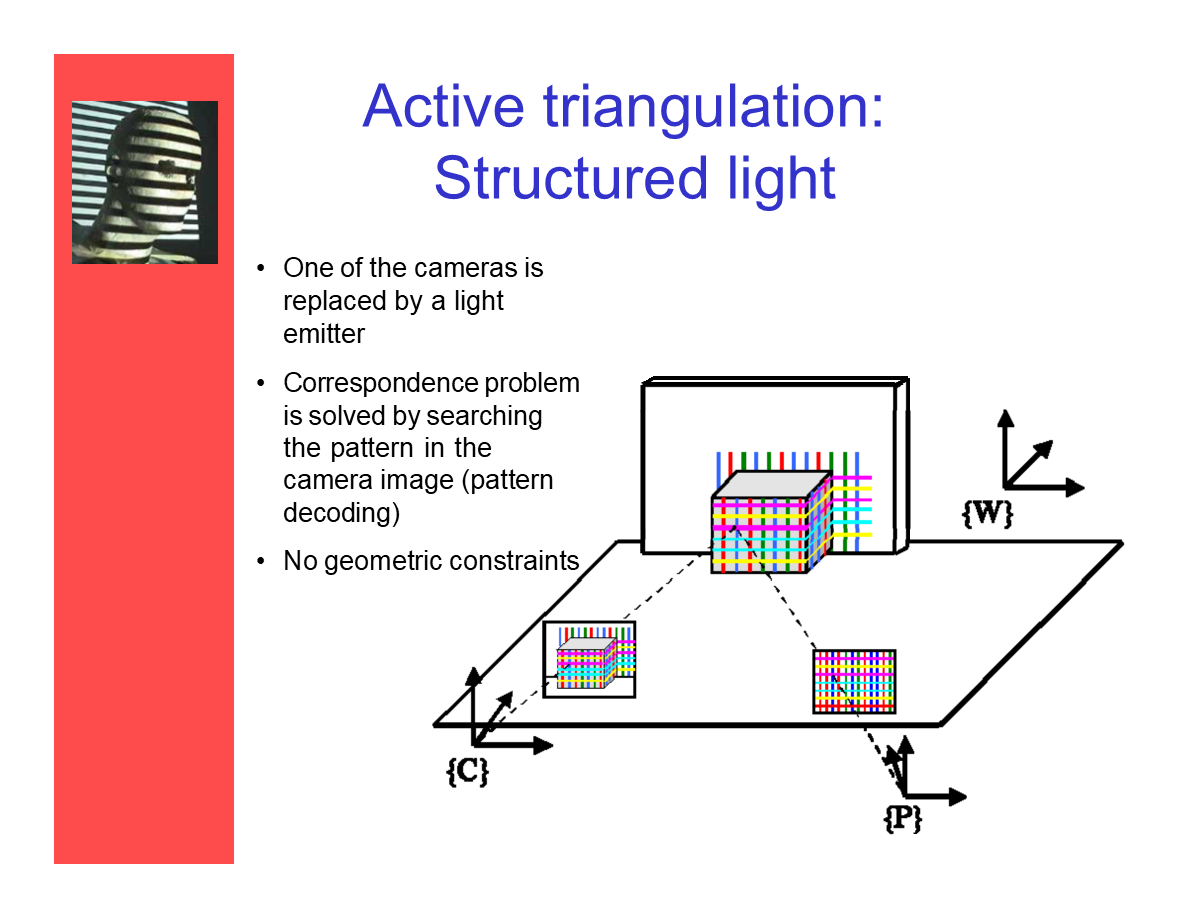
主动三角测量:结构光
- 其中一个摄像机被光投射器代替。
- 对应点问题被转化为在摄像机对应图像中进行纹样查找的问题(纹样解码)。
- 没有几何约束。
概述
*从概述来看,这部分内容我按逻辑接近程度拆成了4节。
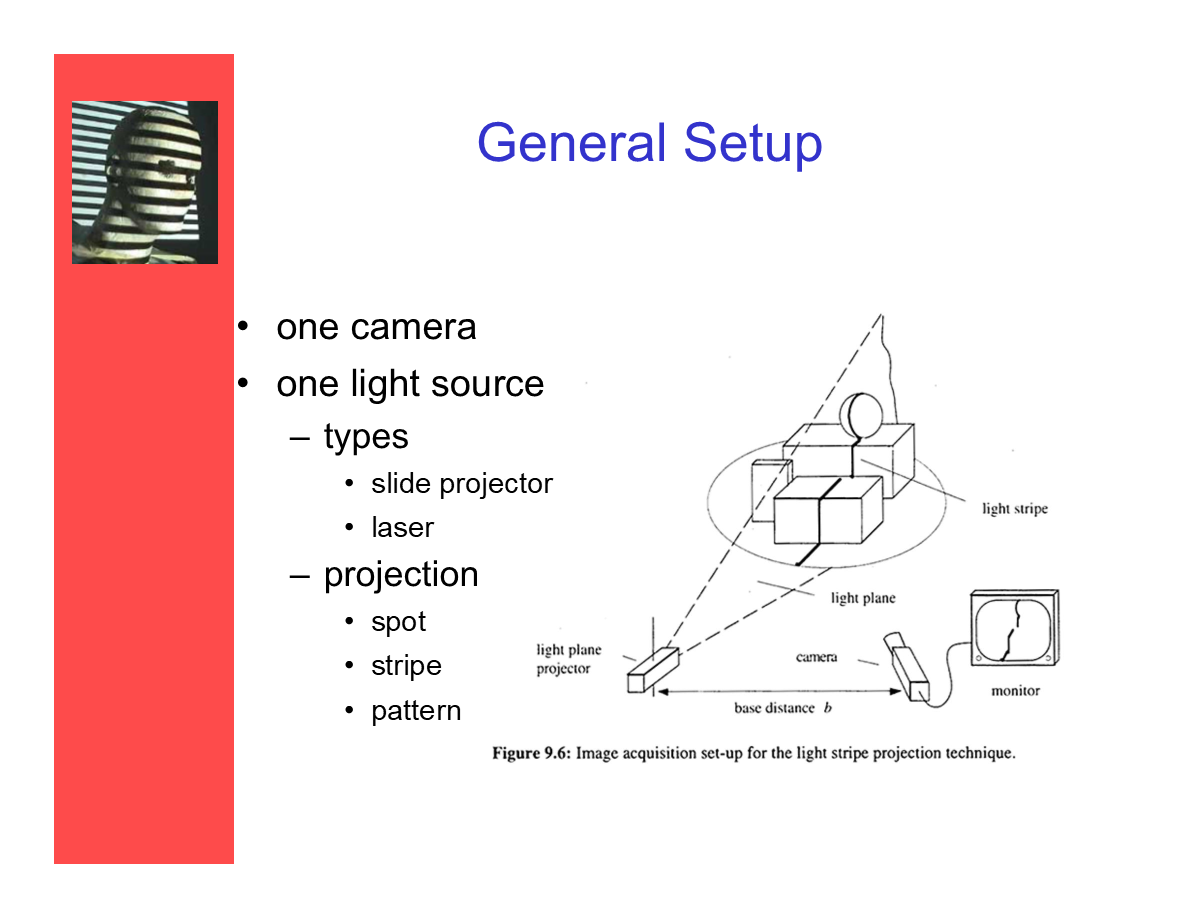
基础设置
一个摄像机。
一个光源:
- ——类型:滑动投射器;激光。
- ——投射:点;带状;纹样。
二、光点投影
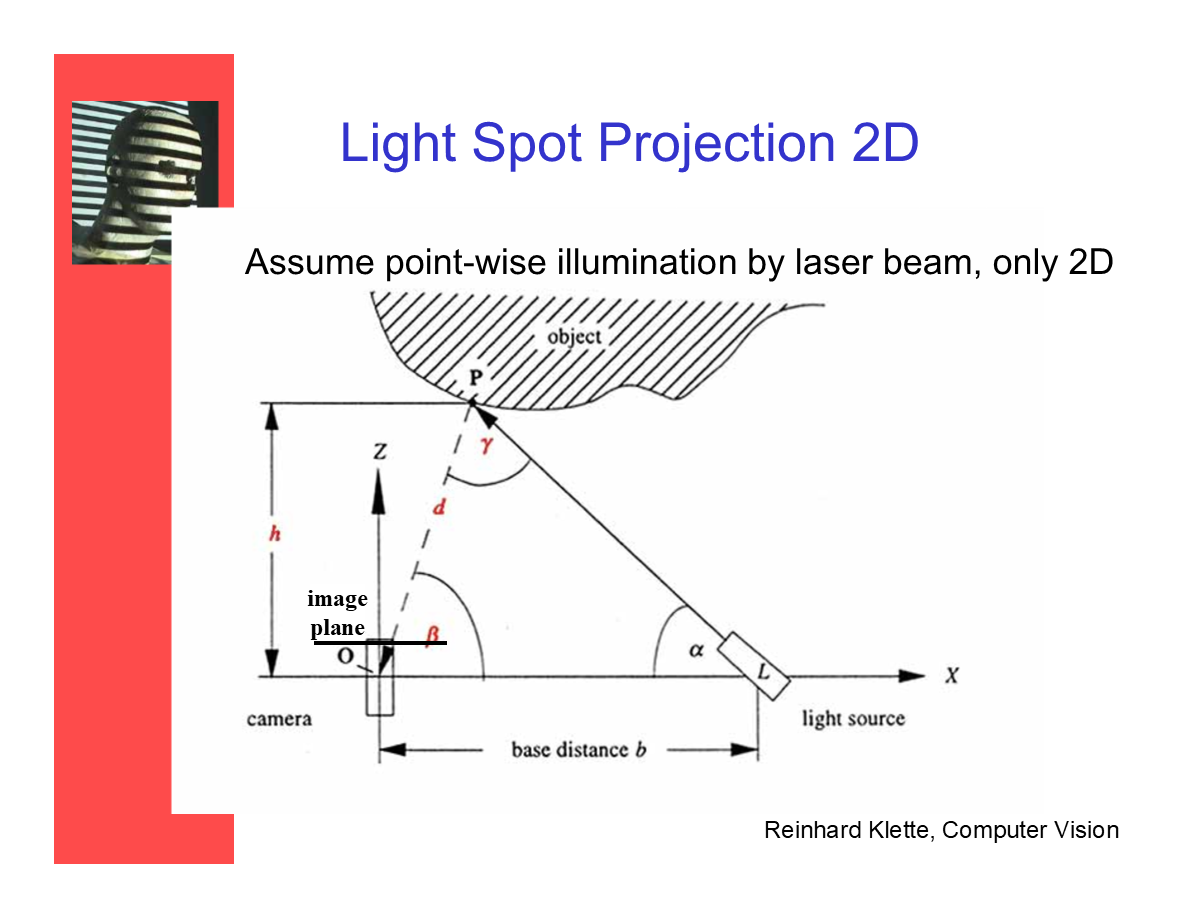
2D光点投射
假设激光束在2D平面上进行逐点式照明。(即设备只考虑水平距离及旋转,接收设备视为一个线段而不是平面)
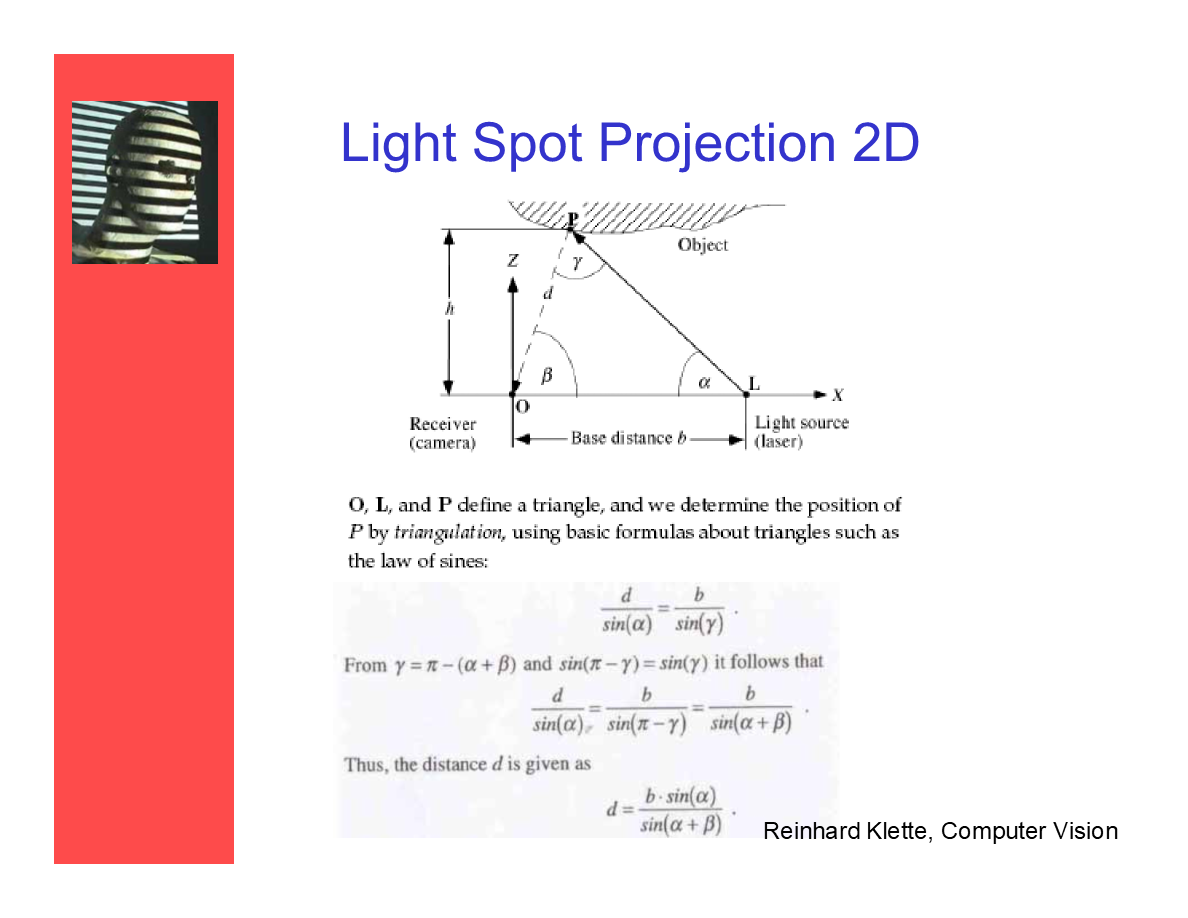
O、L和P点定义了一个三角形,并且我们通过三角测量确认了P点的(空间)位置——使用了如图中公式的基础三角函数sine法则。
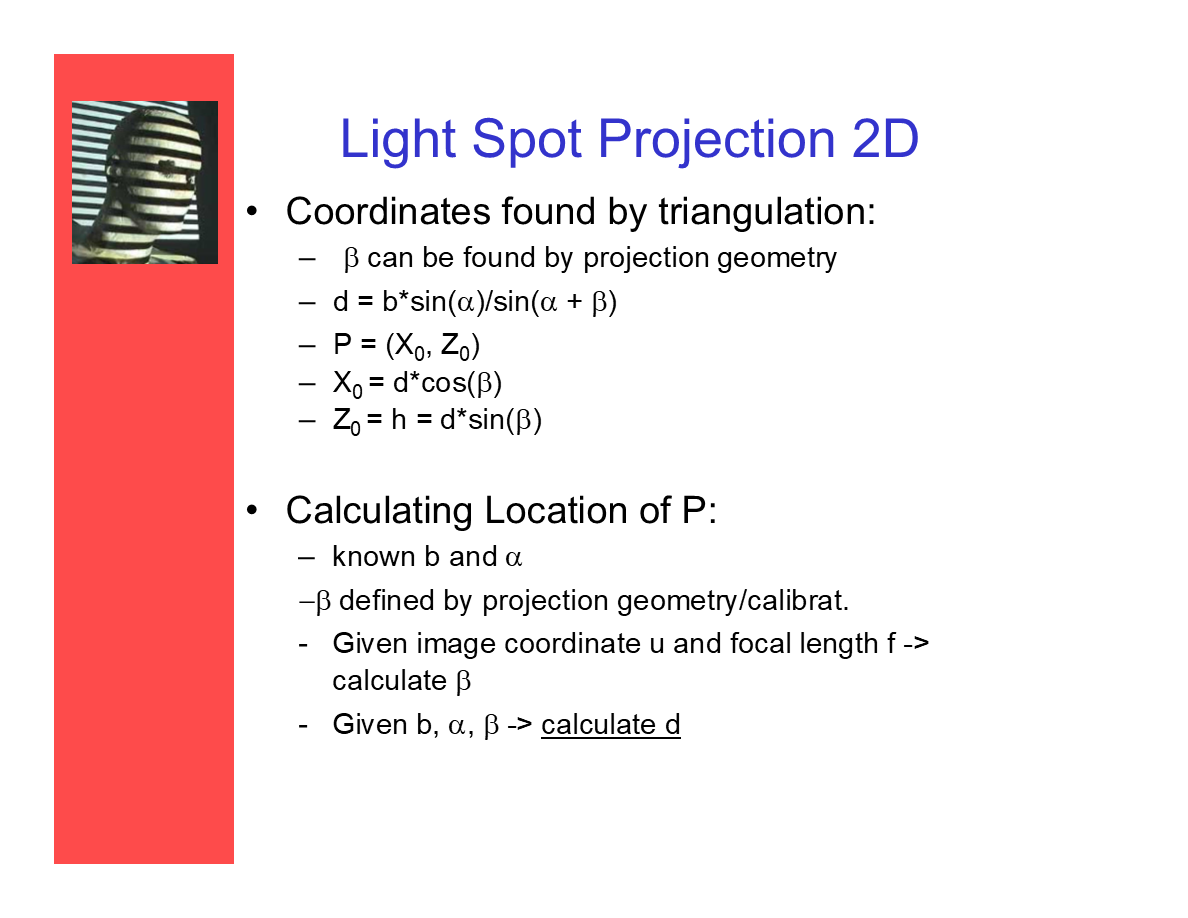
通过三角测量可得出的坐标:
- β可以通过(摄像机)投影几何得出。
- d值的计算(见图中公式)。
- P的坐标用X0,Z0表示——分别可以用d与β的三角函数计算出。
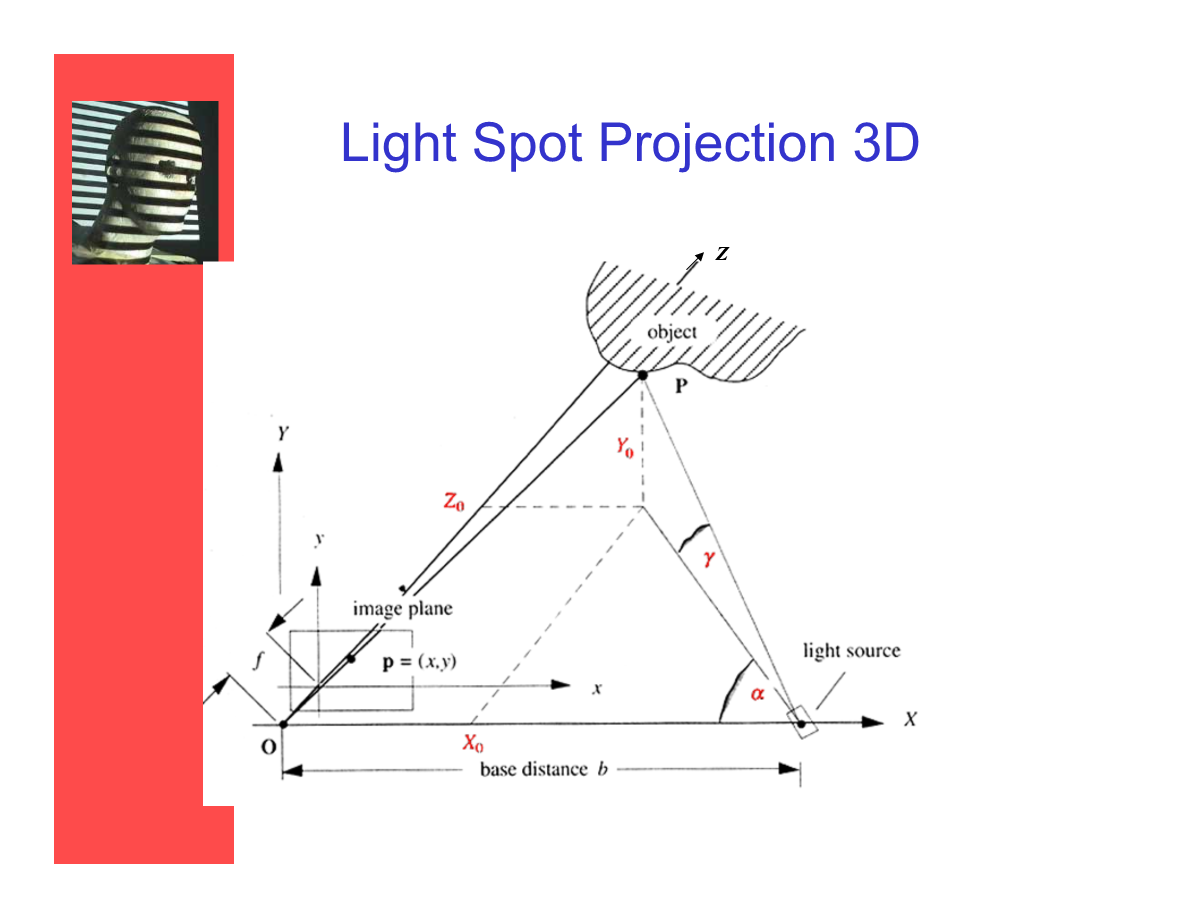
3D光点投射
*3维的情况引入了y轴,接收投影的变成了平面——投影点p位于该平面上。
*发射角度上,除了水平角α,还引入了垂直角γ。
*这里在设备设置后,α和b都是已知给定的。
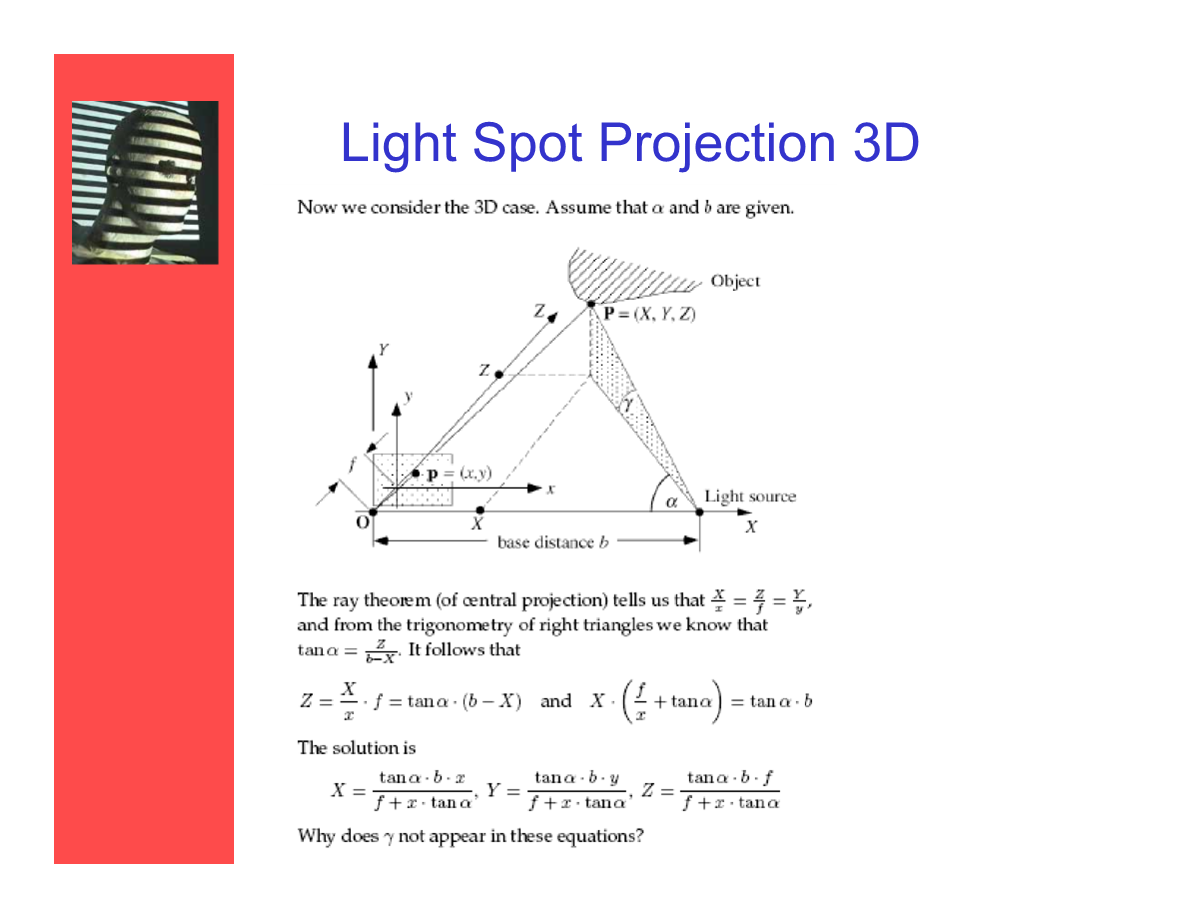
*根据中心点投射的射线定理(ray theorem)——P点的坐标XZY和xfy成正比,其中xy是投影平面上的点p的坐标,f是中心点O到投影平面的距离(写作f其实就是焦距)。
*对于XZ平面上的角α来说,tanα = Z / (b - X)。
*结合前面两个结论可以分别推导出XYZ和tanα的关系(如图)。
最终可以根据α、b 、f、x、y分别计算出X0、Y0、Z0。
一个观察,这部分计算中并没有用到垂直角度γ。
*即根据设备基础的位置角度信息,及投影坐标x、y即可计算点P的坐标。
三、光带投影
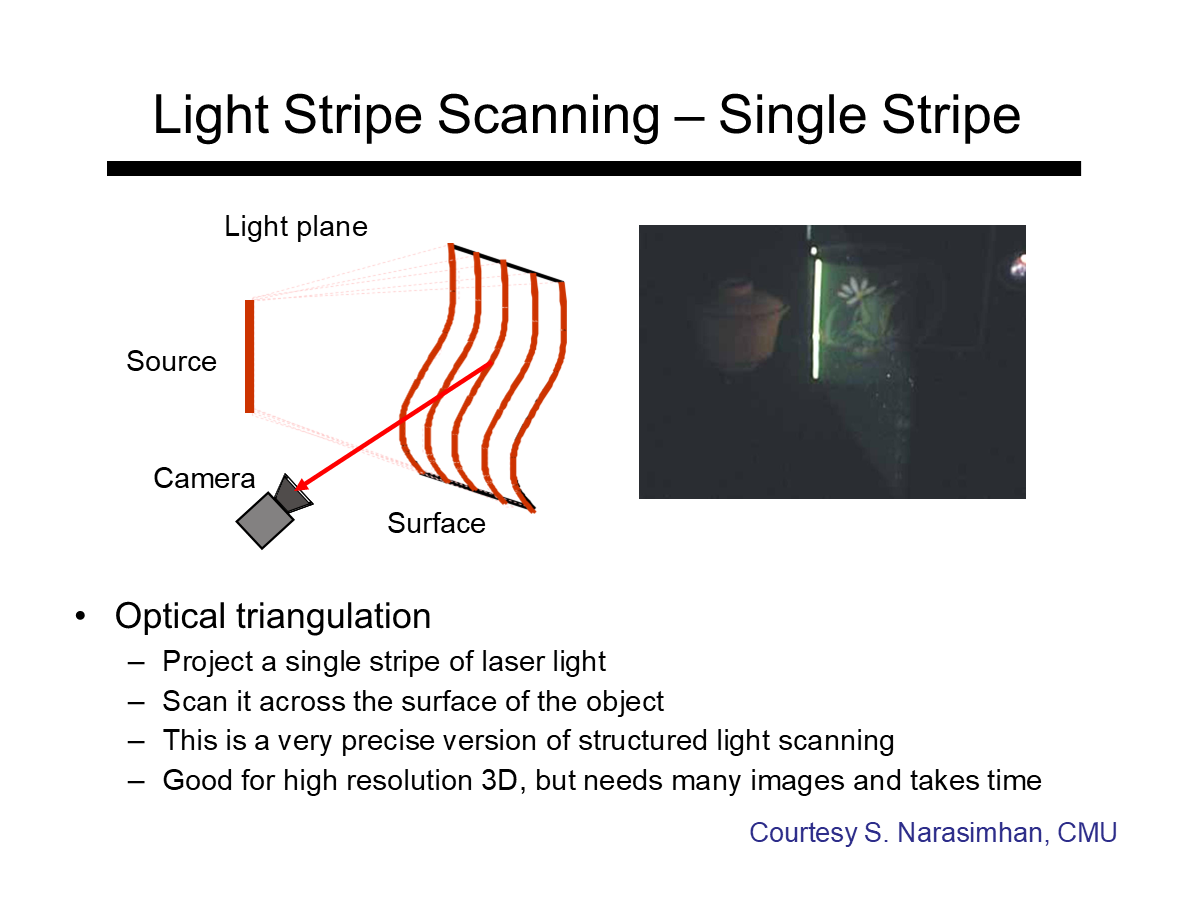
光带扫描——单条
光学三角测量:
- 投射单个激光条
- 用它扫描物体的表面
- 这是结构光扫描的一个非常准确的版本
- 利于生成高精度的3D结果,但需要大量的时间以拍摄很多图片
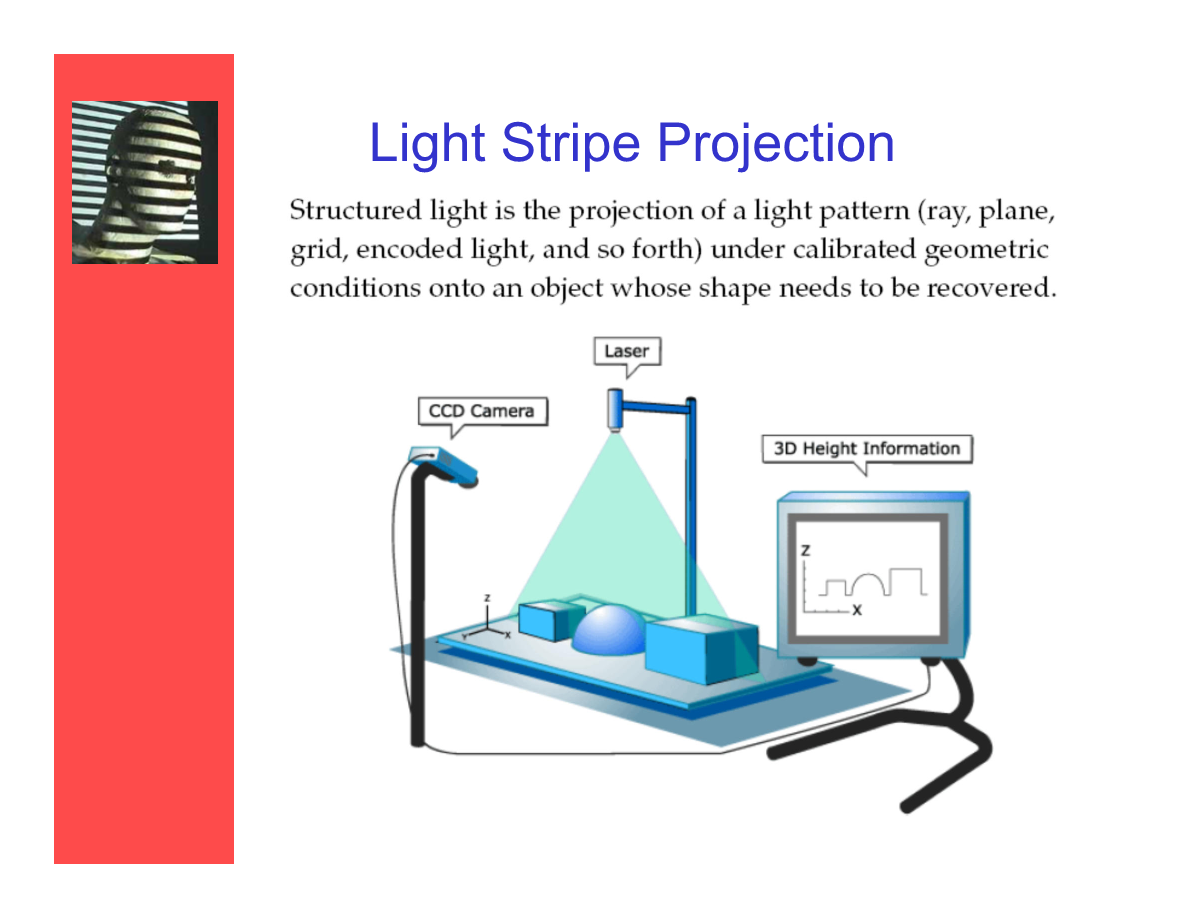
光带投射
结构光方案是——在校准过的几何条件下向目标物体投以一个光纹样(射线、平面、栅格、编码的光源、以及其它),并进行三维重建。
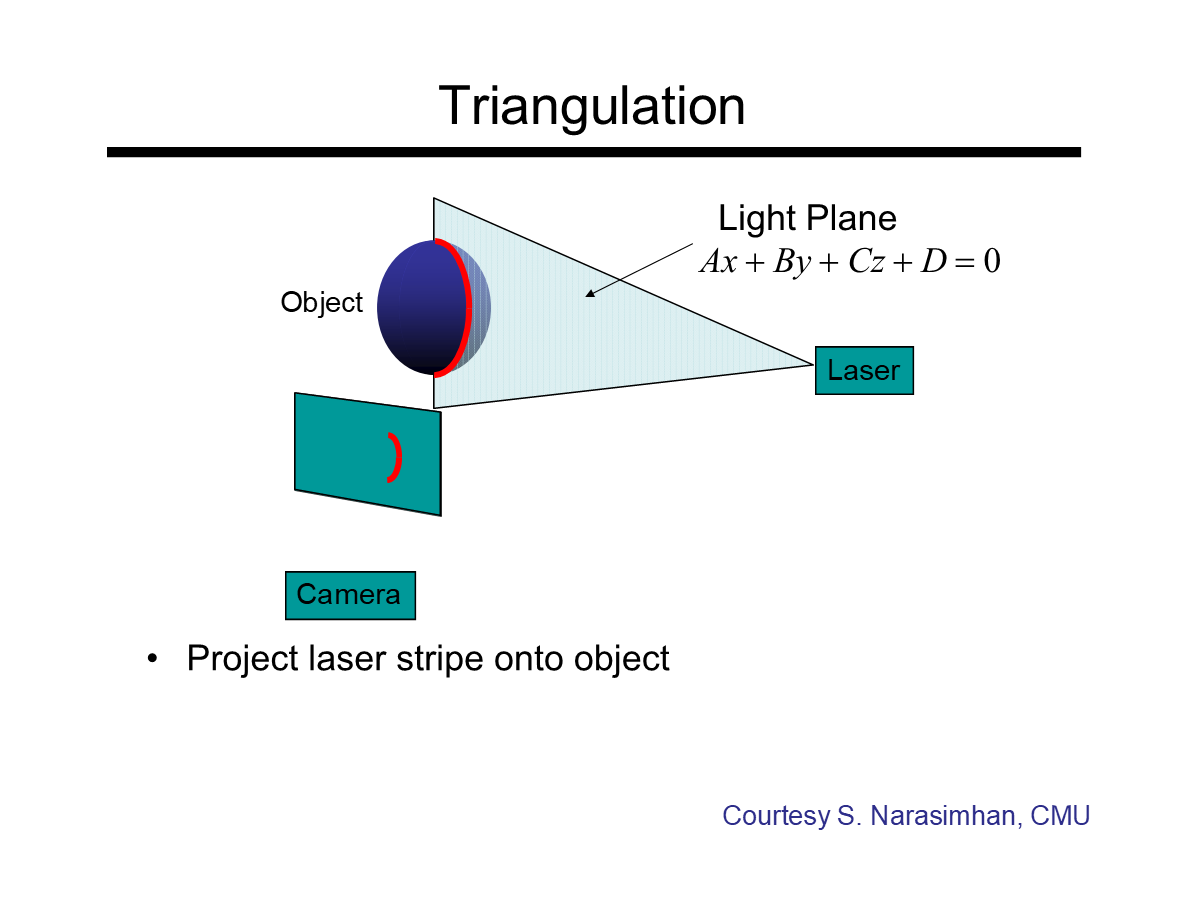
(结构光的)三角测量
*这个案例中激光发射出的是一个“光平面”,它会与物体表面相交投下光带。平面的表达式如图——基于摄像机光学中心为坐标原点。
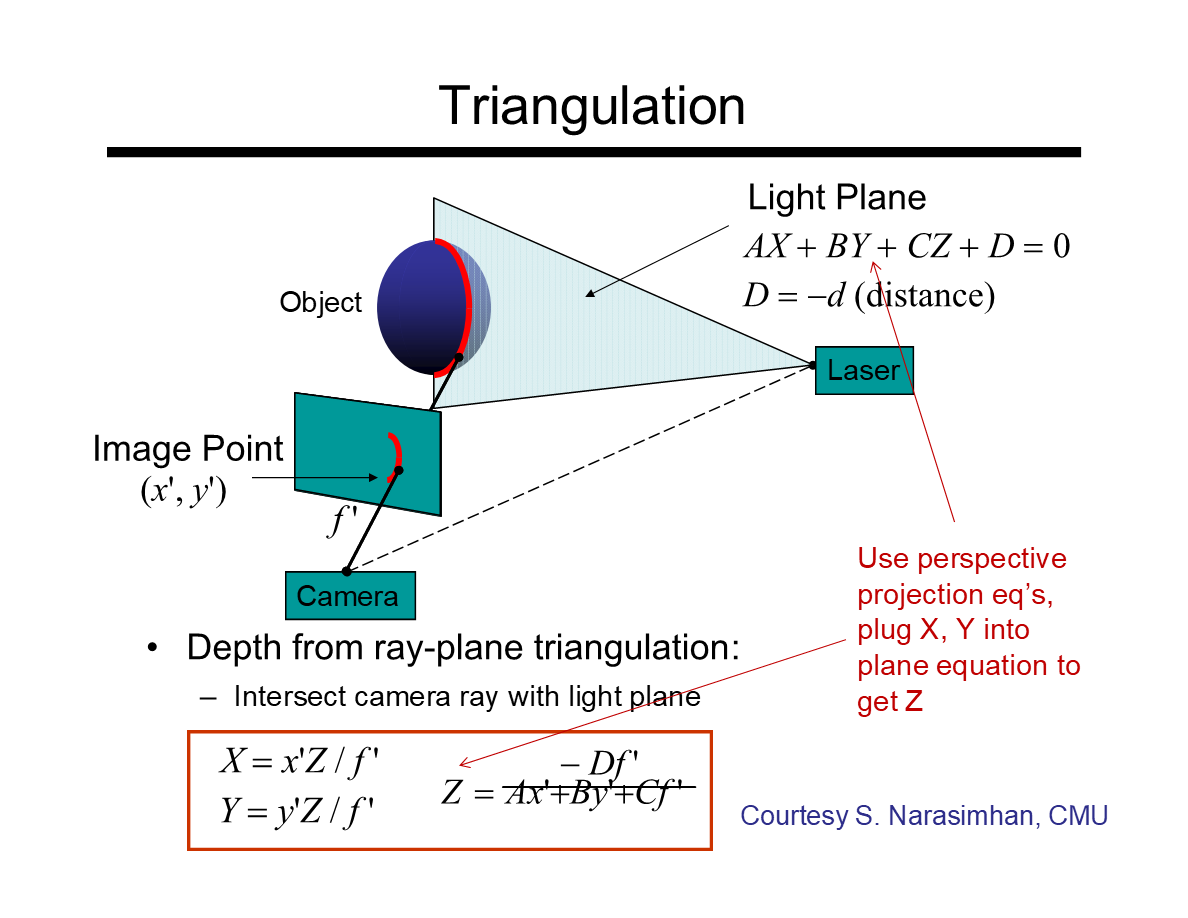
*图中信息较多,这里实际是要在已知一个投影点(x',y')及当前投影校准几何相关信息的前提下,计算三维空间的深度——也就是Z值。
*对于一个点的情况,参照前一节提到的单点三维投射:X/x' = Z/f' = Y/y' 的结论仍是成立的,因此可以得到X、Y值基于Z的表达式(如图)。
*D = -d。其中d是光平面到摄像机光学原点的距离。因为平面方程中ABC的几何意义是平面的法向量,D可以理解成将平面移到坐标原点的距离。
*将已知的x'、y'、f'、D、A、B带入公式即可得出Z值(如图)。在这种坐标设置下,Z值就是物体上的点相对于摄像机的深度值。
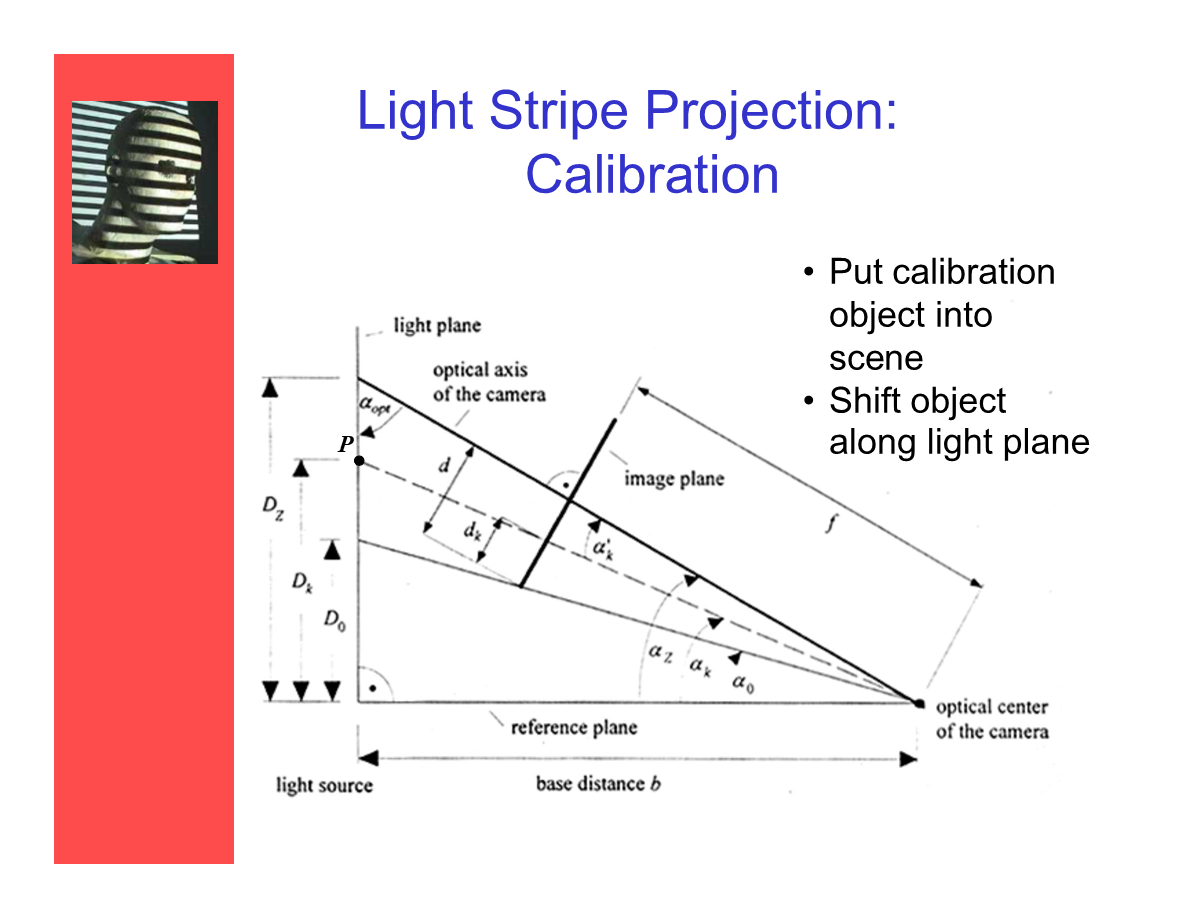
光条投射——校正
将校正物体放入场景,并沿着光平面平移。
*图中从顶视图展示了各个几何关键点的位置关系。通过校准计算可以得出光平面相对于光学原点的平面参数。
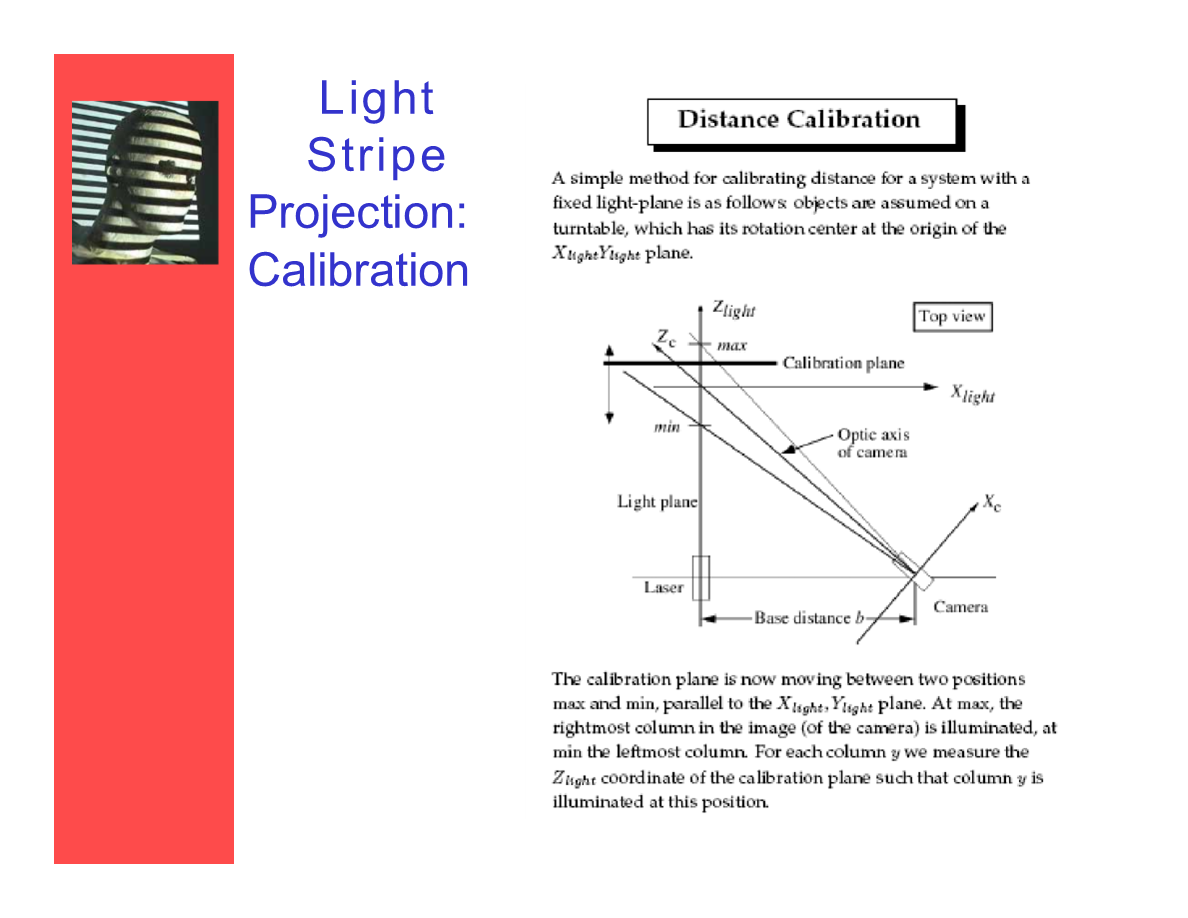
距离校正
要校准一个固定光平面的系统的距离,一个简单的方法是假设目标物体在一个“转盘”上,其旋转中心是光平面的原点。
校准平面在两点——max和min之间移动,与光平面平行。在最大值处,(摄像机的)图像中最右侧的列会被照亮,在最小值处则是照亮最左侧的值。对于每一列y我们测量其在光学平面的Z值,这就是满足y列被照亮的校准平面的坐标值。
*这部分直接翻译理解上可能有点抽象,其实旋转和距离是两个关切点。结合后面的例图应该更好理解一些。
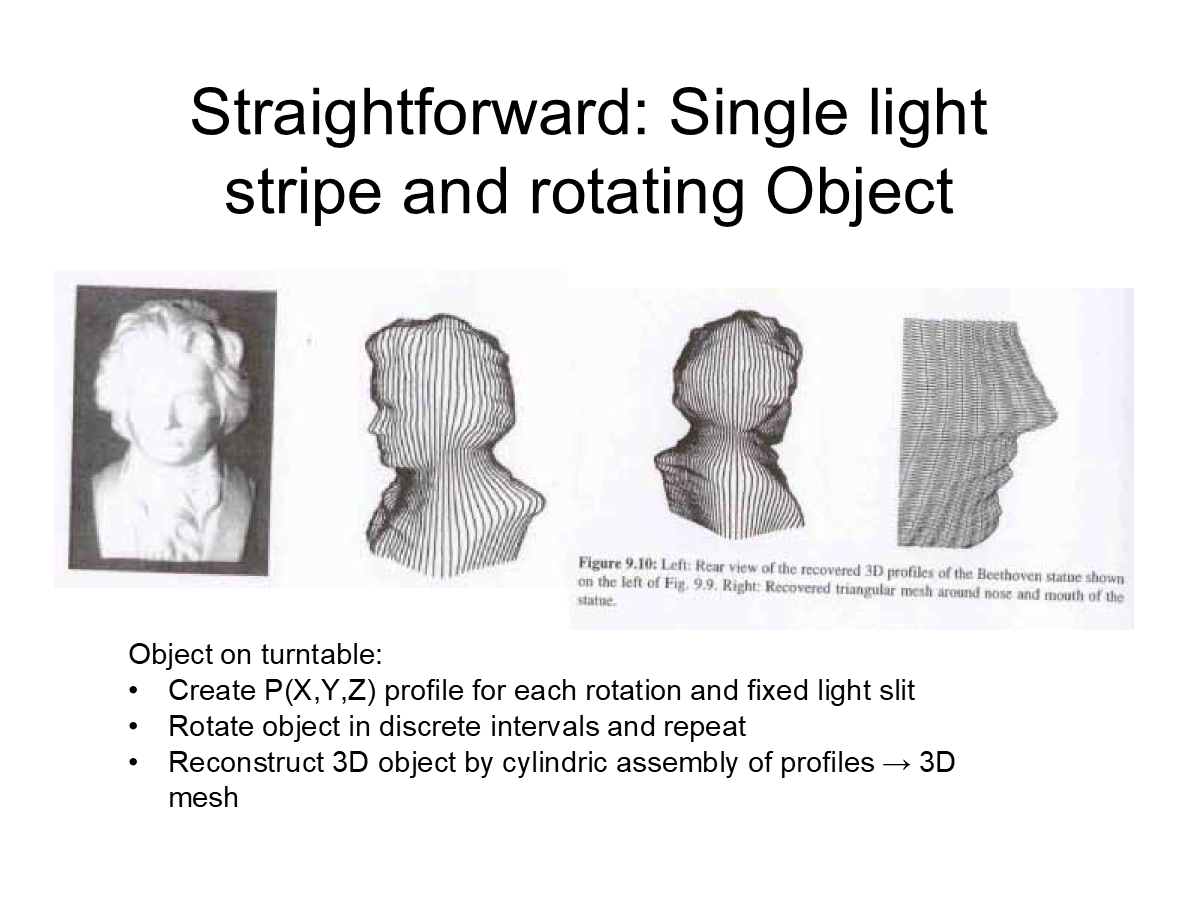
更直接的方法:单条光带与旋转物体
转盘上的物体:
- 对每一个旋转位置和光窄口(slit)创建对应的轮廓P(X,Y,Z)。
- 以离散的间隔旋转物体,并重复这一过程。
- 以柱面方式集成轮廓信息,以重建3D物体——以3D网格的方式。
*注意这里的多条纹是集成后的结果。
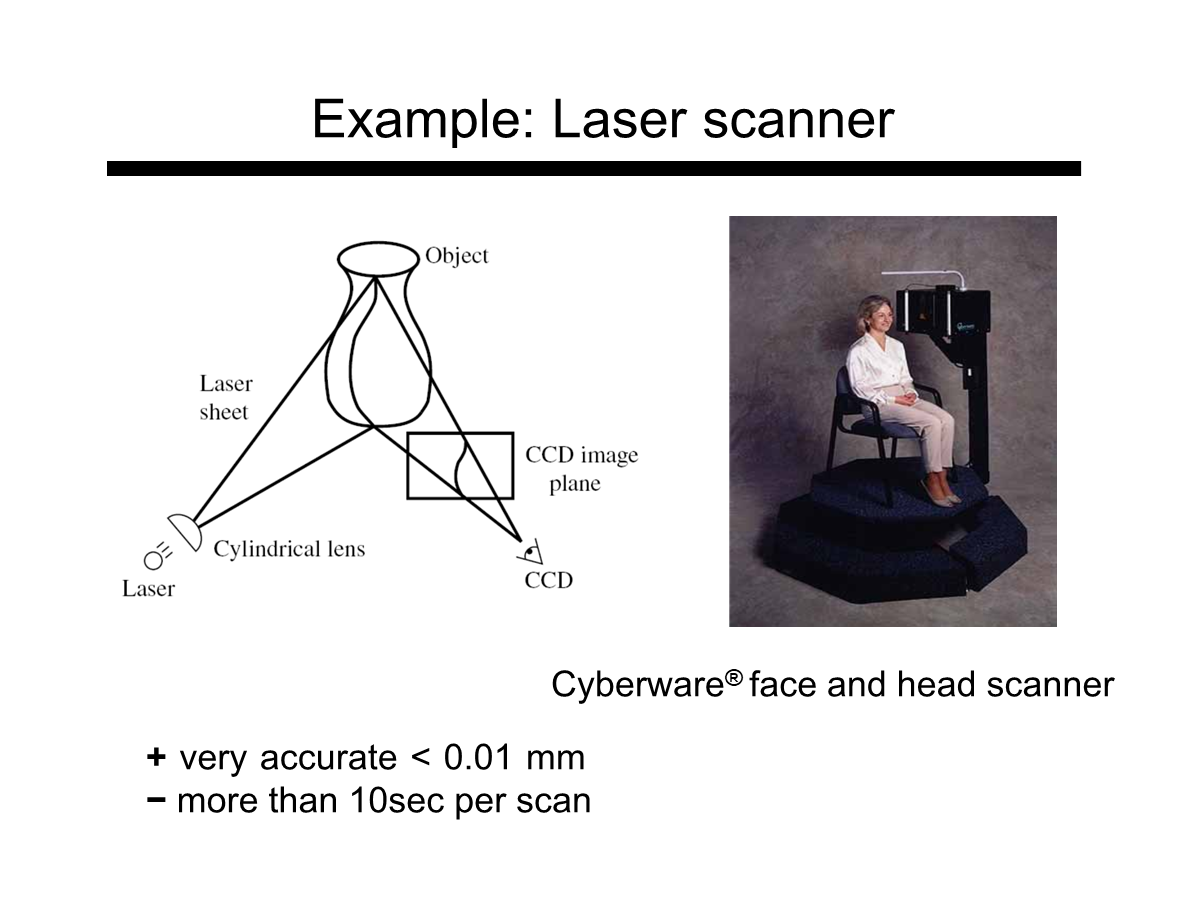
示例:激光扫描器
优点:非常精确,误差在0.01毫米以内。
缺点:需要10秒以上时间完成一次扫描。
便携式3D激光扫描器示例
四、3D拍摄与其它轻量级的方案
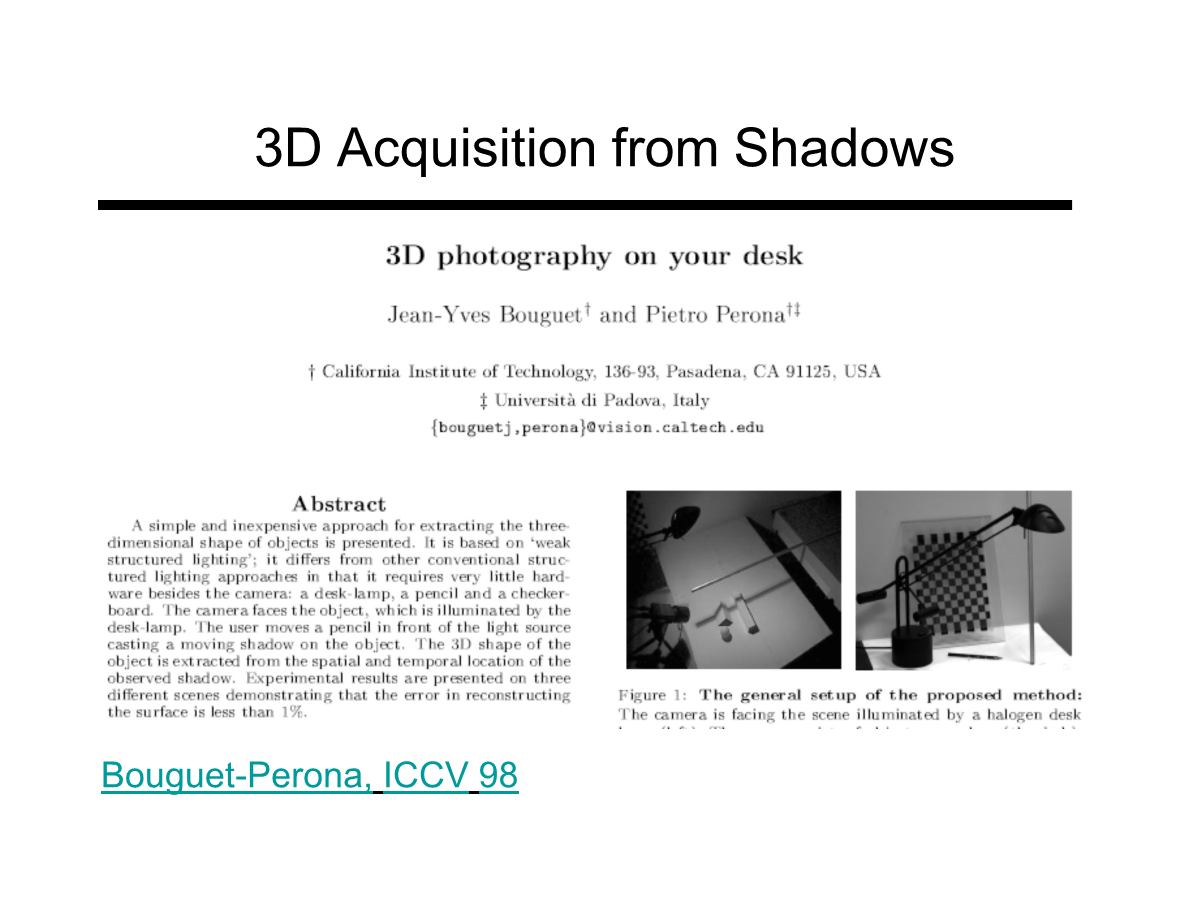
基于阴影的3D信息获取
*这里列出了这一节讨论的内容的论文出处,有兴趣的可以按需搜索。
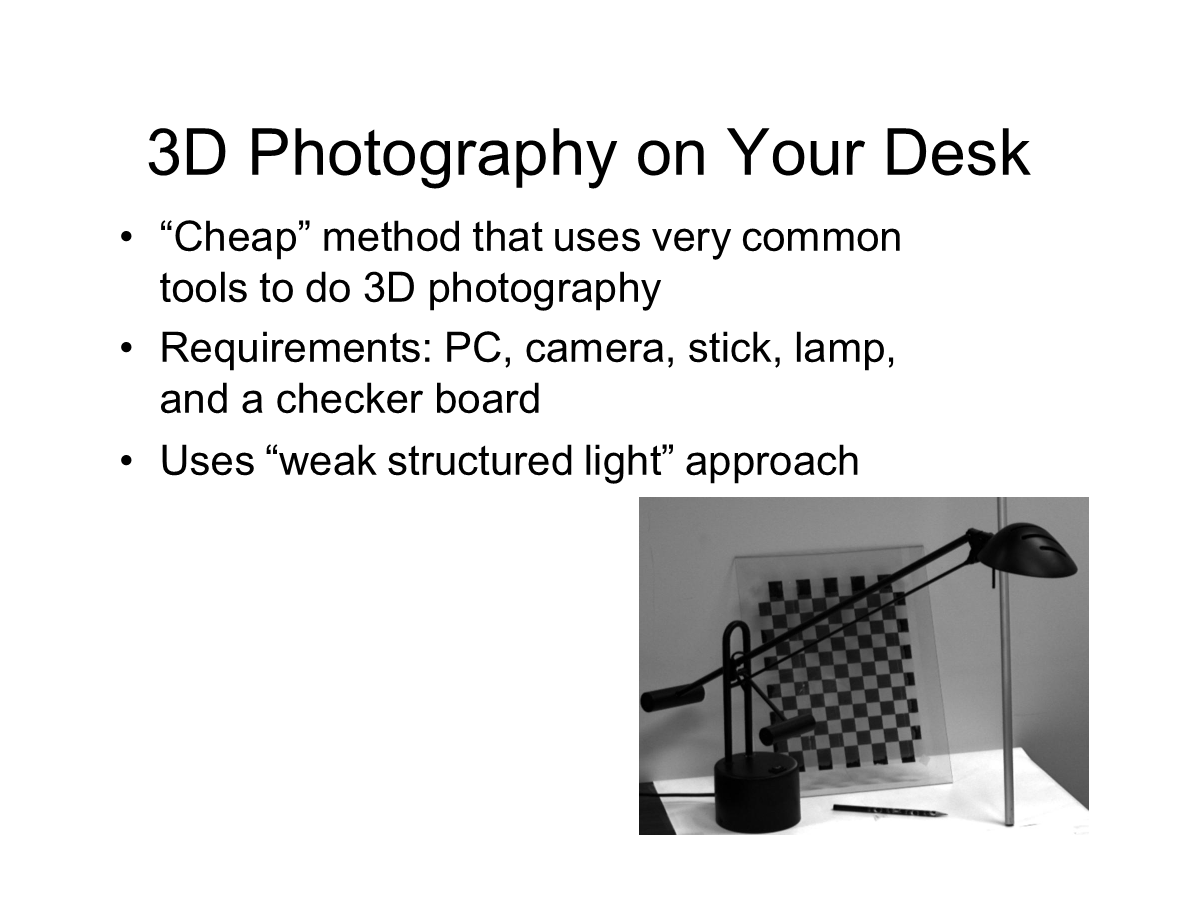
你桌边的3D拍摄工具
- 使用常规工具以“便宜”的方案进行3D拍摄。
- 需要:PC、摄像机、棍子、台灯、棋盘板。
- 使用“弱结构光”方案。
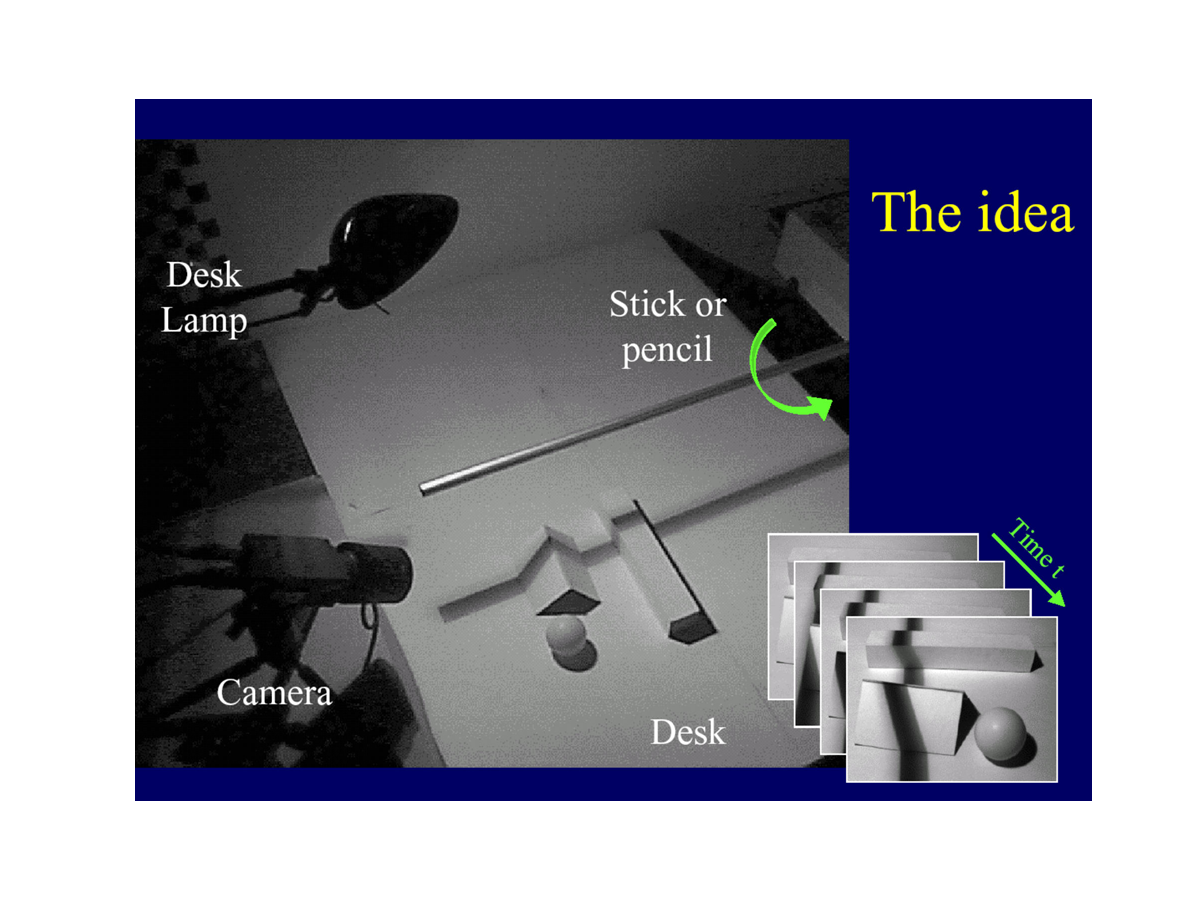
设备设置示意图
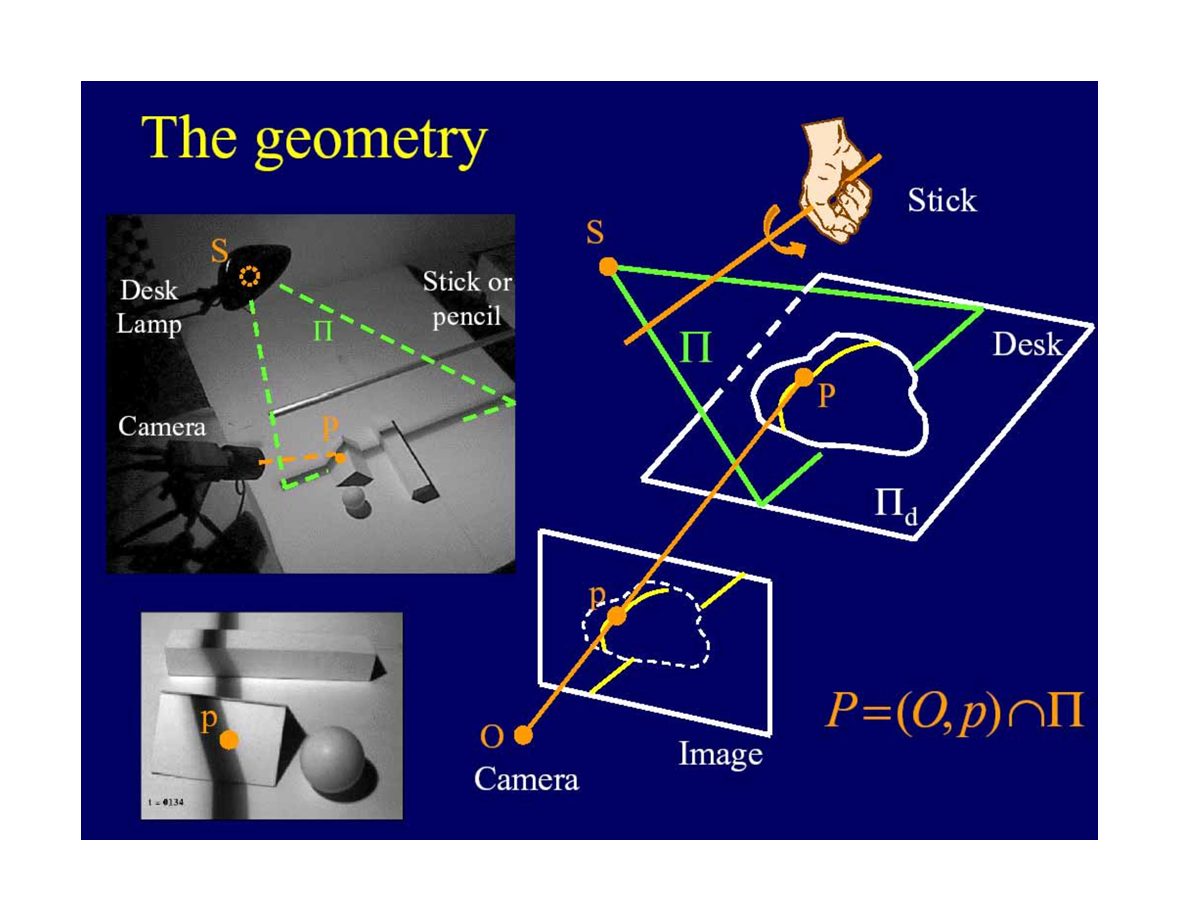
*可以看到,这里的棍子的阴影起到了之前光带的作用。
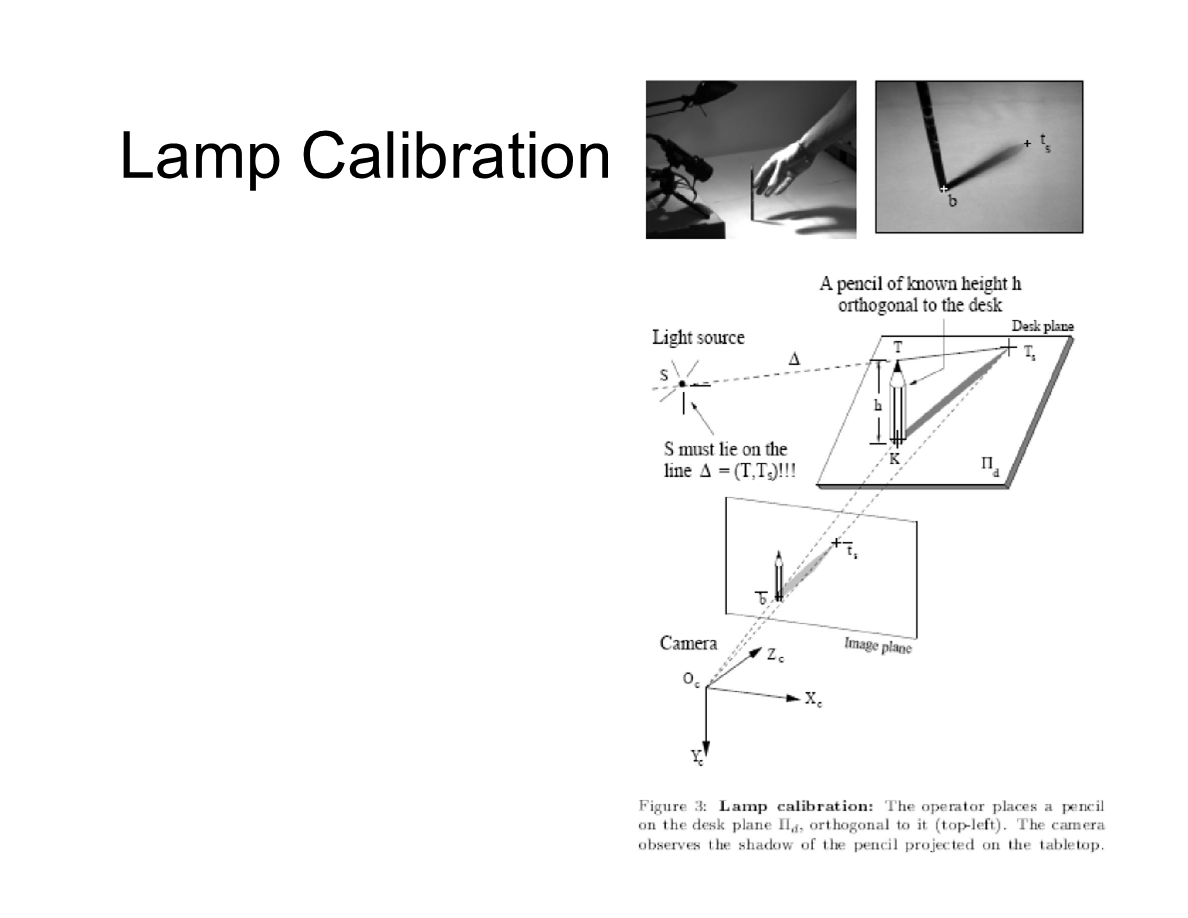
台灯校准
台灯校准:操作者在桌面放置了一根铅笔,与其垂直。在摄像机中观测铅笔在桌面投下的阴影。光源中心S需要在T和Ts的延长线上。
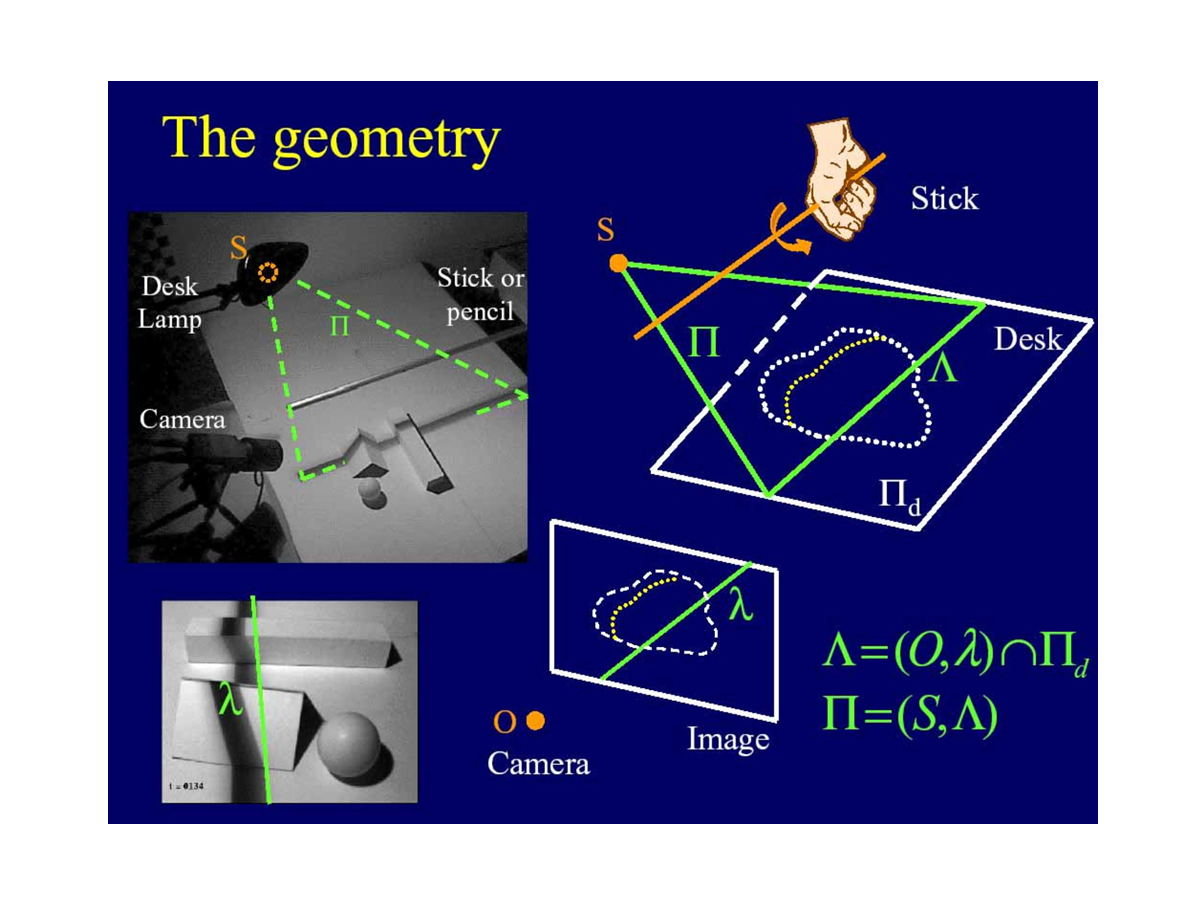
当棍子与桌面平行时
* ∩ 是相交的符号, Λ 是平面(O, λ)与 Π d的相交直线。
*Π是由S和Λ确定的平面。在确定了“人造光平面”后,问题就转化为了前一节解决的问题。
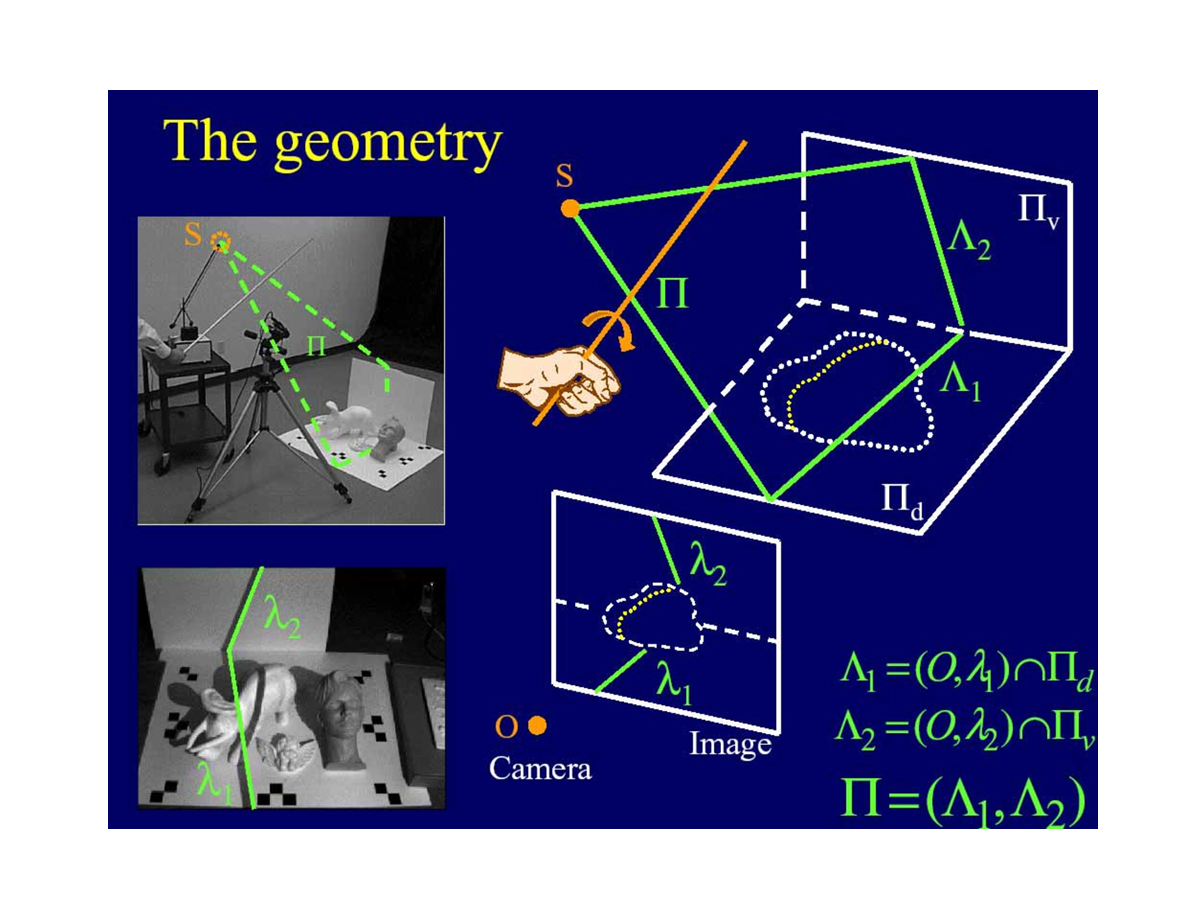
当棍子与桌面有角度时
*这里额外引入了一个平面和一根线,最终用两条相交线确认了平面Π 。推导方式和前一页原理相同。
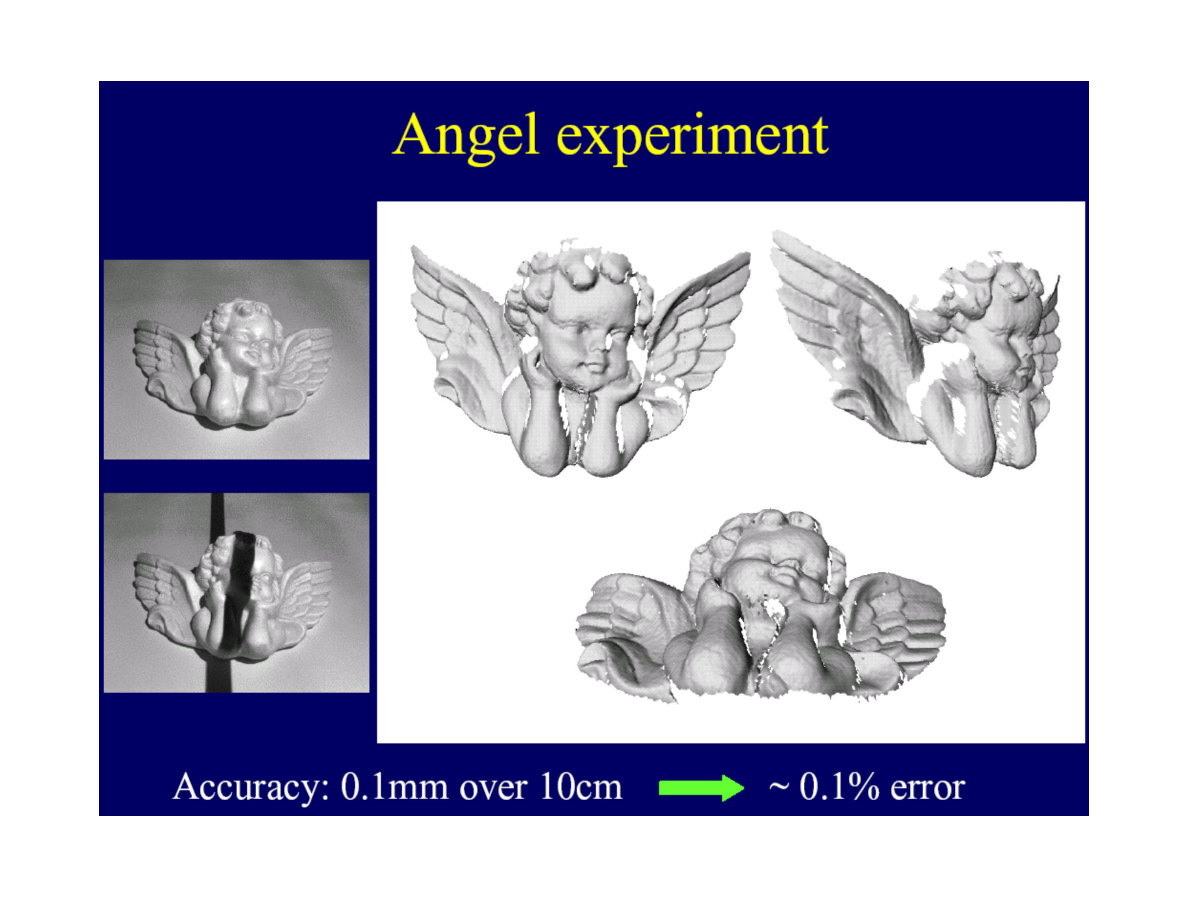
天使实验
*从图中可以看出,这种方法误差是0.1%,但也有一些位置信息不能很好的确定——和阴影宽度有关。
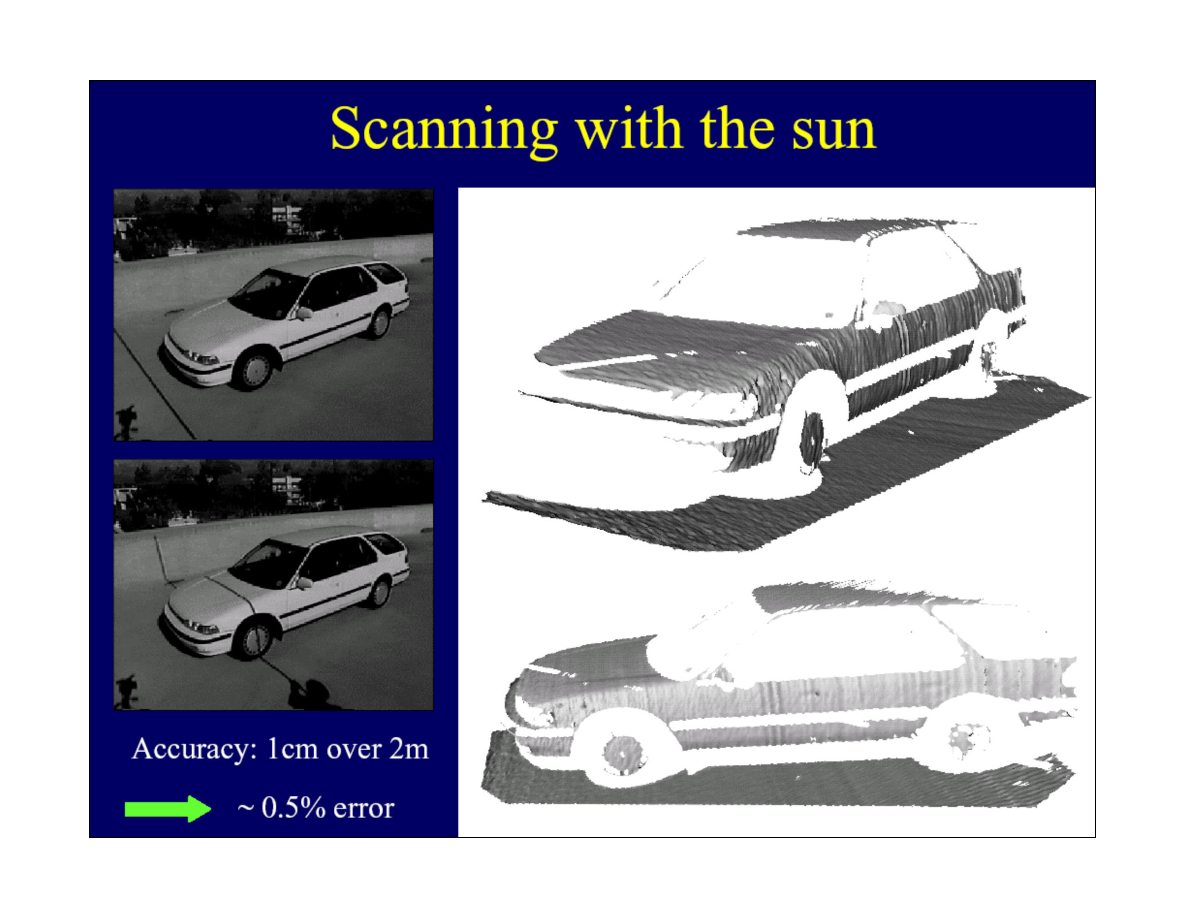
基于日光的扫描
*图中虽然是黑白的,但是主要思路是用细棍在车身投影。误差是 0.5% 。
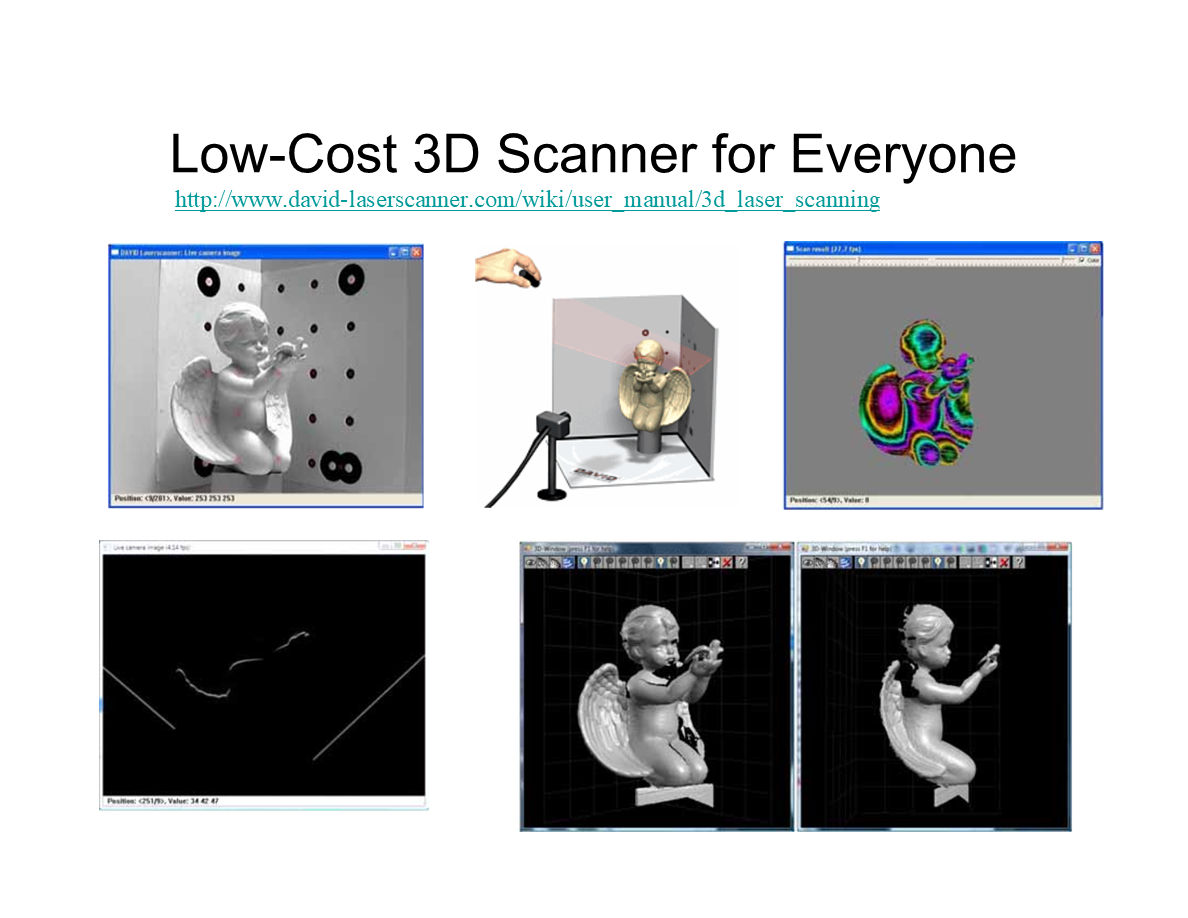
大家都能使用的低成本3D扫描器
*从图中可以看出扫描小物体需要的设备尺寸及扫描情况。
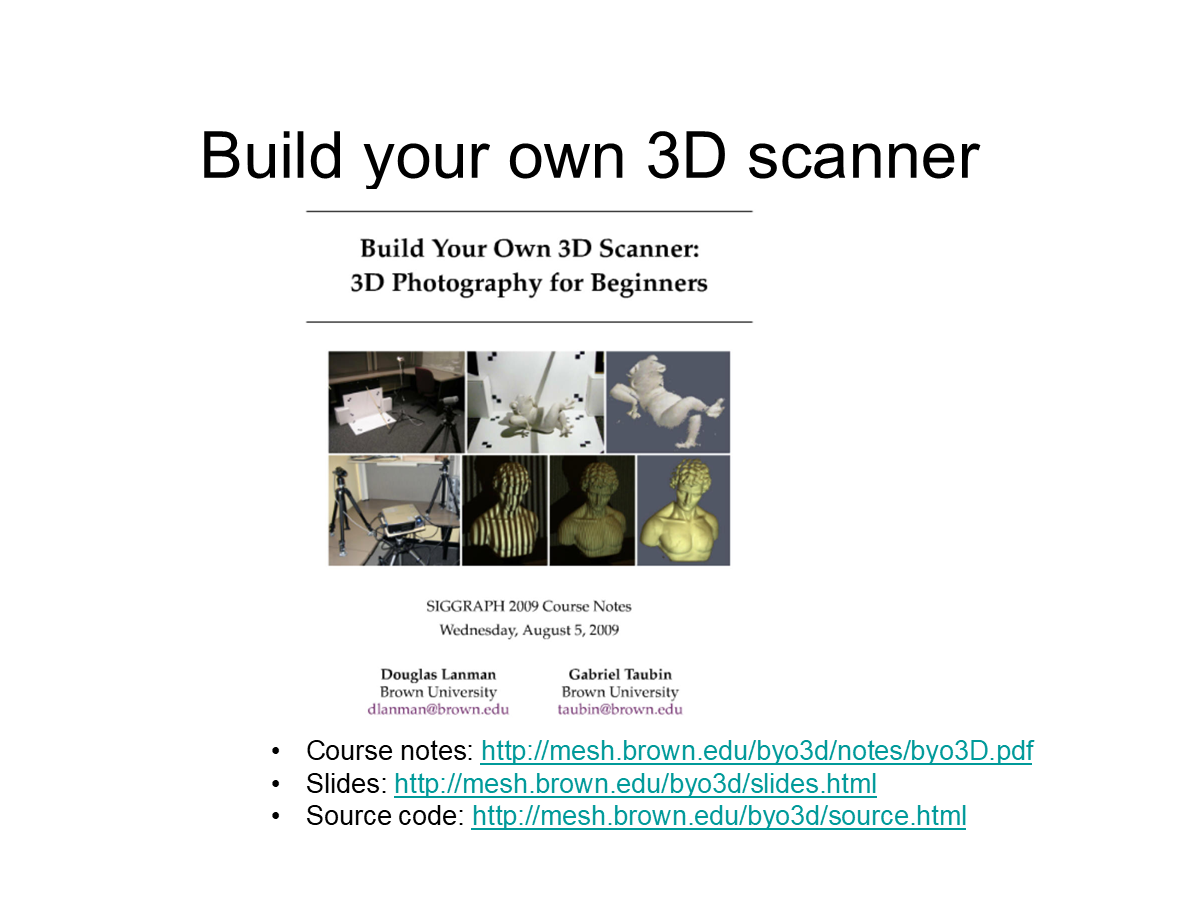
*图中是2009年的一篇SIG文章,其中介绍了包括结构光在内的一些常见的3D扫描技术。
结语
通过粗读这篇课件,我们了解了结构光方案作为一项“主动”方案在确定性及便捷性上的优点。在本篇的最后停在了光带(或人造阴影条)进行扫描测量的部分,涉及的计算没有超出立体几何的范围。
这个系列两篇文章的下一篇会介绍以“编码纹样”进行结构光扫描的方案(Pattern encoding/decoding),相对会更难理解一些,但确实也是提升结构光方案效率的必经之路。
下面是资料链接:
Structured Lighting Guido Gerig CS 6320, 3D Computer Vision Spring 2015