《極限競速地平線5》中循跡剎車是玩家們轉向常用的操作,那麼這個轉向方式的具體機制是怎樣的呢,想要了解的玩家請看下面“QNMBMZ”帶來的《極限競速地平線5》循跡剎車機制解讀,希望能夠幫助大家。
據我理解循跡剎車大概有兩個主要意義——銜接縱橫向抓地力轉換以獲得接近完全的輪胎抓地力和主動控制重量轉移以控制前後軸動態。
這裡詳細說明一下這兩個部分。
對於由剎車(縱向)過渡到轉向(橫向)的過程容易有一些誤會,比如先轉向再開始松剎車,比如松剎車的過程中轉向角度恆定,再比如松剎車的速率恆定。
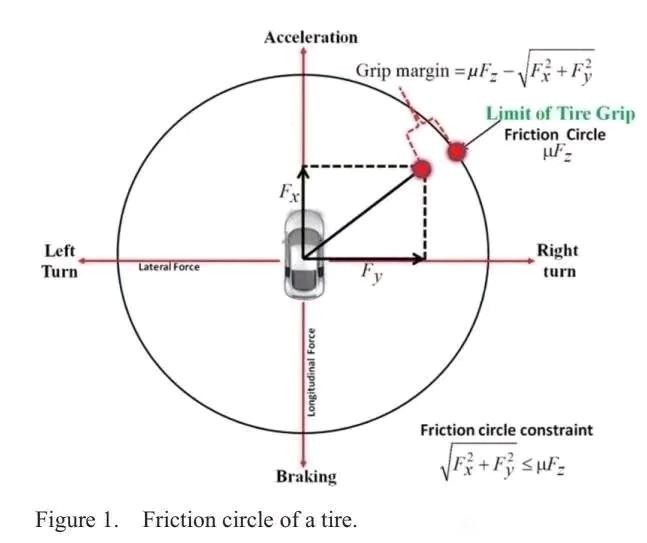
首先需要明晰的一點,就是輪胎由縱橫向構成的總抓地力一定,在單向達到極限後,沒有再增加其他側向力的空間。(可以參考圖二)也就是當剎車在縱向用到的抓地力臨界極限時,只有先釋放剎車,才能予轉向空間。
第二,雖然當抓地力逐漸由縱向至橫向轉換,我們已經可以感受到前軸(橫向)抓地力越來越強,但不要忘記這是一個過渡過程,我們的目的是完全的轉向。也就是隨著縱向所需的抓地力逐漸下降,橫向可用的抓地力上升,我們需要在松剎車的過程中增大轉向幅度。
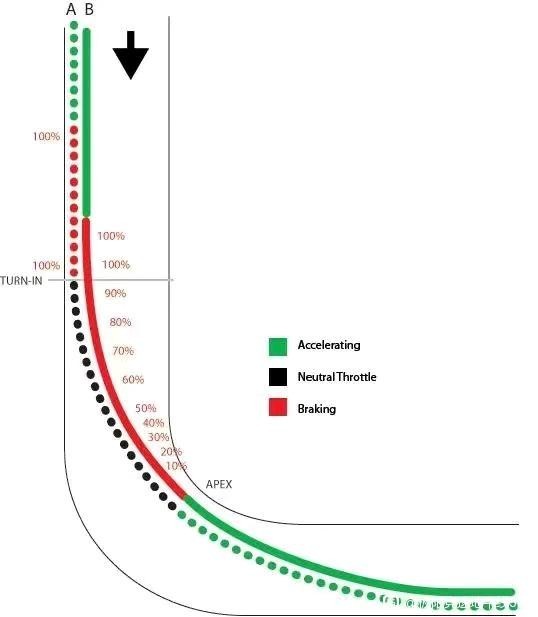
第三,如圖一可以看到,雖然循跡剎車允許更晚的剎車點,但較於一般走線,入彎時機仍是接近的,因為更晚的剎車點這一單一條件並不能直接保證入彎速度,我們仍需為高速的轉向留出空間。由於向彎心接近的過程中,需要轉向的角度是不斷增大的,即離心力不斷增大,為了最大化整體速度和保持抓地,我們的速度變化便將與之相反。也就是在入彎的前半段,剎車應該松得更快,接近彎心的後半段,才是緩松加轉向的最主要區間。
接下來說另一個部分,主動控制重量轉移。
標準的外內外線路和循跡過程是一個參考,而面對實戰,上次在應對不同彎道的走線中有提到兩個概念,慢入快出(提前彎心)和延遲彎心,言下之意也就是對出彎速度與入彎速度的取捨。
打比方說,一個半徑縮小彎(後半段越來越窄),如果仍選擇幾何彎心,就會面臨後半段路面不足,此時便只有兩個選擇,要麼什麼也不做等待滑行出彎,要麼開油上樹。所以,面對這種情況,我們就需要把循跡剎車的過程帶得更長,保持對前軸持續的重量轉移,直至看到出彎口才能開油。雖然我們無法正常開油而損失出彎速度,但由於延長了循跡剎車的過程,也就保持了更快的入彎速度。
另一種情況,面對正常的半徑固定彎道,假設不小心錯過了最佳剎車點,也就連帶錯過了最佳入彎點,這時同樣面臨路面不足,但由於出彎口可見,與上面相反,我們可以通過快速釋放剎車製造過快的重量轉移,令前軸立即獲得橫向抓地力,而後軸稍稍失去抓地力,也就得以短時間內調整方向準備出彎。這屬於一種救車方法。