《极限竞速地平线5》中循迹刹车是玩家们转向常用的操作,那么这个转向方式的具体机制是怎样的呢,想要了解的玩家请看下面“QNMBMZ”带来的《极限竞速地平线5》循迹刹车机制解读,希望能够帮助大家。
据我理解循迹刹车大概有两个主要意义——衔接纵横向抓地力转换以获得接近完全的轮胎抓地力和主动控制重量转移以控制前后轴动态。
这里详细说明一下这两个部分。
对于由刹车(纵向)过渡到转向(横向)的过程容易有一些误会,比如先转向再开始松刹车,比如松刹车的过程中转向角度恒定,再比如松刹车的速率恒定。
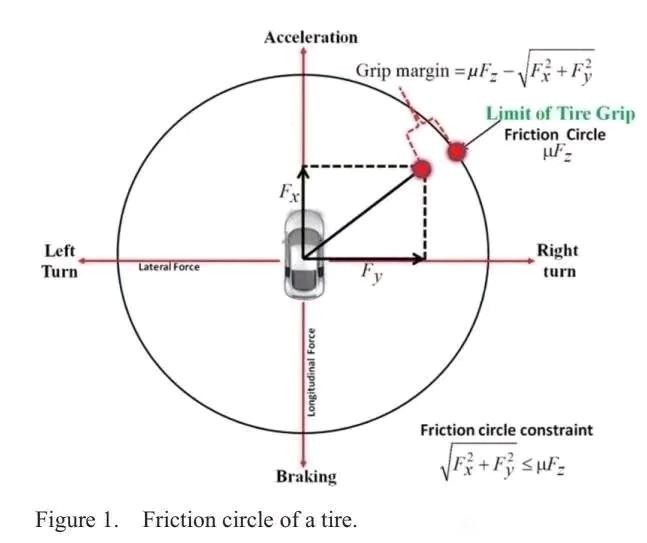
首先需要明晰的一点,就是轮胎由纵横向构成的总抓地力一定,在单向达到极限后,没有再增加其他侧向力的空间。(可以参考图二)也就是当刹车在纵向用到的抓地力临界极限时,只有先释放刹车,才能予转向空间。
第二,虽然当抓地力逐渐由纵向至横向转换,我们已经可以感受到前轴(横向)抓地力越来越强,但不要忘记这是一个过渡过程,我们的目的是完全的转向。也就是随着纵向所需的抓地力逐渐下降,横向可用的抓地力上升,我们需要在松刹车的过程中增大转向幅度。
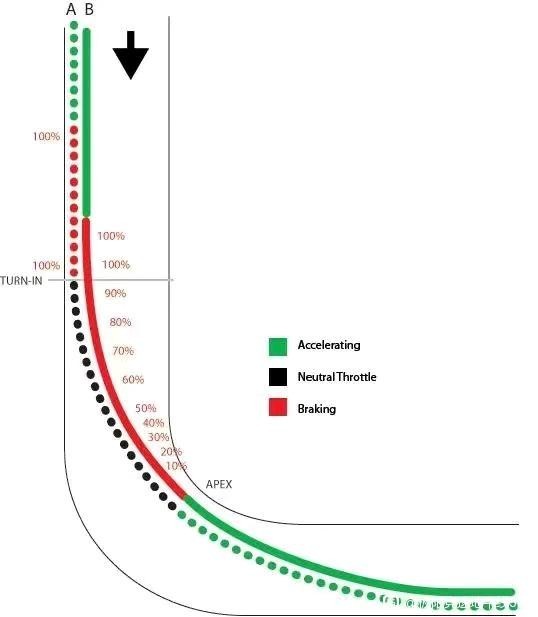
第三,如图一可以看到,虽然循迹刹车允许更晚的刹车点,但较于一般走线,入弯时机仍是接近的,因为更晚的刹车点这一单一条件并不能直接保证入弯速度,我们仍需为高速的转向留出空间。由于向弯心接近的过程中,需要转向的角度是不断增大的,即离心力不断增大,为了最大化整体速度和保持抓地,我们的速度变化便将与之相反。也就是在入弯的前半段,刹车应该松得更快,接近弯心的后半段,才是缓松加转向的最主要区间。
接下来说另一个部分,主动控制重量转移。
标准的外内外线路和循迹过程是一个参考,而面对实战,上次在应对不同弯道的走线中有提到两个概念,慢入快出(提前弯心)和延迟弯心,言下之意也就是对出弯速度与入弯速度的取舍。
打比方说,一个半径缩小弯(后半段越来越窄),如果仍选择几何弯心,就会面临后半段路面不足,此时便只有两个选择,要么什么也不做等待滑行出弯,要么开油上树。所以,面对这种情况,我们就需要把循迹刹车的过程带得更长,保持对前轴持续的重量转移,直至看到出弯口才能开油。虽然我们无法正常开油而损失出弯速度,但由于延长了循迹刹车的过程,也就保持了更快的入弯速度。
另一种情况,面对正常的半径固定弯道,假设不小心错过了最佳刹车点,也就连带错过了最佳入弯点,这时同样面临路面不足,但由于出弯口可见,与上面相反,我们可以通过快速释放刹车制造过快的重量转移,令前轴立即获得横向抓地力,而后轴稍稍失去抓地力,也就得以短时间内调整方向准备出弯。这属于一种救车方法。