
原作者:Reddit用户Oshida_BCFreedom
转载与翻译已获得原作者允许,并在原文基础上有所改动。
若有错误,欢迎批评斧正。
————————————————
2.29.0.72 -> 2.29.0.73
cn_type130_he,AS-20,AS-30,AS-30L,fr_matra_t_10_131a,fr_matra_t_10_131b,AS.34,S-1OF,Kh-23M,Kh-25,Kh-25,Kh-25ML,Kh-25MR,Kh-29L,Kh-29L,Kh-29T,Kh-29TD,Kh-29TE,Kh-66,su_s_13_rocket,S-13DF,S-21,S-24,S-24B,S-25L,su_s_25ld,S-25O,S-25OF,S-25OFM,m/57B 火箭榴弹,RP,AGM-12B,AGM-12C,APKWS II (M151),us_zuni_mk40_mod0,us_zuni_mk40_mod1,us_zuni_wafar_mk24,us_zuni_wafar_mk63(有些在游戏中没有实际使用所以只有文件名,后同):现在有超压伤害
ISU-122(所有):乘员现在会受到超压伤害
2.29.0.73 -> 2.29.0.74
突击者/HVM,箭-10M2:
视角位置移动
移除了一个“骨骼”,可能会有影响但是我不知道影响在哪儿
2.29.0.74 -> 2.29.0.75
LOSAT:MGM-166A:
穿深现在会受到速度影响
添加了德玛尔公式的参数
无间断模式:
车队:
7 AAA:有效射击频率:0.3 -> 0.1
3 AAA:
准确度:0.5 -> 0.3
对空准确度:0.5 -> 0.3
有效射击频率:0.5 -> 0.3
LBT Land Battles:8 AAA:有效射击频率:0.3 -> 0.1
2.29.0.75 -> 2.29.0.77
改善了客户端的稳定性
2.29.0.77 -> 2.29.0.78
游戏参数:
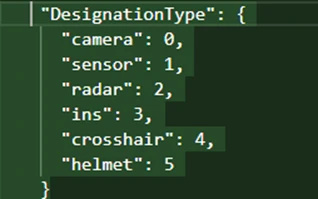
导引头:添加了指定类型表(原文:Added Designations Type List)
AV-8A,AV-8B Plus,AV-8C,海鹞FRS.1,鹞GR.1,鹞GR.3,鹞GR.7,雅克-141:自动驾驶仪:
Roll:Rate PID:Imax:1 -> 0.1
Pitch:Rate PID:Imax:1 -> 0.1
流星改 (誉二三):
近地表最大速度:564.84 -> 586
Propeller Type 0:
几何参数:
半径:1.65 -> 1.75
Blade Pitch 0:18.86 -> 19.31
Blade Width 0:0.15 -> 0.18
Blade Pitch 1:8.85 -> 8.56
Blade Width 1:0.23 -> 0.26
Blade Width 2:0.19 -> 0.23
Blade Pitch 3:-8.51 -> -7.91
Blade Width 3:0.14 -> 0.1
Screen Effect Thrust Mult 10 Dist:4.95 -> 5.25
Polar:
line Cl Coeff:0.075 -> 0.085
Cl 0:0.17 -> 0.12
alpha Crit Low:-14 -> -17
Cl Crit High:1.24 -> 1.2
Cl Crit Low:-0.88 -> -0.72
Cd Min:0.0073 -> 0.008
After Crit Decline Coeff:0.0222 -> 0.018
After Crit Max Distance Angle:36 -> 38
Cl After Crit High:0.95 -> 1
Cl After Crit Low:-0.75 -> -1
Oswalds Efficiency Number:6.549 -> 0.9
Mach Crit 1:0.6 -> 0.79
Mult Mach Max 1:7 -> 4
Mult Line Coeff 1:-5.2 -> -3
Mult Limit 1:1 -> 2
Mach Crit 2:0.65 -> 0.79
Mach Max 2:0.97 -> 0.995
Mult Mach Max 2:6.7 -> 3.9
Mult Line Coeff 2:-3.7 -> -2
Mult Limit 2:1 -> 2
Mach Crit 3:0.3 -> 0.25
Mach Max 3:1 -> 1.5
Mult Mach Max 3:0.32 -> 0.6
Mult Line Coeff 3:-0.44 -> -0.2
Mach Crit 4:0.3 -> 0.25
Mach Max 4:1 -> 1.5
Mult Mach Max 4:0.4 -> 0.6
Mult Limit 4:0.25 -> 0.7
Mach Crit 5:0.01 -> 0
Mach Max 5:0.02 -> 0
Mult Mach Max 5:7.2 -> 0.6
Mult Limit 5:7.2 -> 0.6
重量:
重量:203 -> 165
直径:3.3 -> 3.5
调速器:
Pitch Min:24 -> 22
Pitch Max:54 -> 56
Governor Speed:0.19 -> 0.17
Governor Min Param:1500 -> 450
Governor Max Param:2999.5 -> 2900
Governor Afterburner Param:3000 -> 2900
Propeller 0:Cyclic Pitch Axis Direction Pitch:[0.0,90.0] -> [-180.0,90.0]
起落架:Sink Rate Mult:1.04416 -> 1.06232
自动驾驶仪:Pitch:
添加了攻角限制参数
添加了Load Factor Filter Smooth Coeff
添加了Load Factor Limiter Strength Max
Fw 190 A-5/U12,Fw 190 A-5,Fw 190 A-5/U2,Fw 190 A-5/U14,Fw 190 A-8,NC.900,Fw 190 F-8:Engine Type 0:温度:
Water Flow Effect Power:2 -> 0.2
Oil Flow Effect Power:2 -> 0.2
Water Prop Flow Speed Coeff:0.8 -> 1
Oil Prop Flow Speed Coeff:0.8 -> 1
米-35M:电传操纵系统:Mode Preset 3:
Rudder Mode:Climb -> Rate
Throttle Mode:Manual -> Climb
米格-29(所有):
空气动力学参数:Wing Plane:
Spin Cdloss:0.32 -> 0.14
Arm:
添加了AOA Shift Add 4
添加了AOA Shift Add 5
重量:空重:10725 -> 11010
自动驾驶仪:Pitch:
Rate Max 2:[900.0,-60.0,60.0] -> [900.0,-50.0,50.0]
Rate Max 3:[1100.0,-60.0,60.0] -> [1100.0,-40.0,40.0]
Rate Max 4:[1300.0,-50.0,50.0] -> [1300.0,-40.0,40.0]
米格-29SMT:
空气动力学参数:Wing Plane:
Spin Cdloss:0.32 -> 0.14
Arm:
添加了AOA Shift Add 4
添加了AOA Shift Add 5
自动驾驶仪:Pitch:
Rate Max 2:[900.0,-60.0,60.0] -> [900.0,-50.0,50.0]
Rate Max 3:[1100.0,-60.0,60.0] -> [1100.0,-40.0,40.0]
Rate Max 4:[1300.0,-50.0,50.0] -> [1300.0,-40.0,40.0]
超级军旗:
添加了电传操纵系统
Engine Type 0:
主要参数:
最大转速:8900 -> 8550
加力最大转速:8900 -> 8550
Shaft RP MMax:8900 -> 8550
温度:
Mode 1:转速:7800 -> 7600
Mode 2:转速:8100 -> 7900
Mode 3:转速:8600 -> 8300
Mode 4:转速:8900 -> 8550
起落架:
Gear Offset:0.2 -> 0.1
Strut L:弹簧系数:260000 -> 290000
Strut R:弹簧系数:260000 -> 290000
自动驾驶仪:
Roll:
Rate Max:[0.0,0.0] -> [-100.0,100.0]
Angle Max:[0.0,0.0] -> [90.0,90.0]
Rate PID:
Kp:0 -> 1
Imax:0 -> 1
Angle PID:Kp:0 -> 1
Auto Rate Pid Mult:
Kp:0 -> 4
Ki:0 -> 1
Imax:0 -> 5
Kd:0 -> 1
Lim:[-2147440000.0,2147440000.0] -> [-1.0,1.0]
Pitch:
Rate Max:[0.0,0.0] -> [-60.0,60.0]
Angle Max:[0.0,0.0] -> [-50.0,50.0]
Balance Load Factor:True -> False
Load Factor Time Mult:1 -> 0.9
Aoa Time Mult:1 -> 2
Rate PI D:
Kp:0 -> 1
Lim:[-2147440000.0,2147440000.0] -> [-0.65,0.65]
Angle PI D:Kp:0 -> 1
Load Factor Pid Mult:
Imax:0 -> 1
Rate Mult:1 -> 0.694444
Lim:[-2147440000.0,2147440000.0] -> [-400.0,400.0]
Aoa Pid Mult:
Kp:0 -> 0.9
Ki:0 -> 0.1
Imax:0 -> 100
Kd:0 -> 0.4
Lim:[-2147440000.0,2147440000.0] -> [-1.0,1.0]
Yaw:
Rate Max:[0.0,0.0] -> [-50.0,50.0]
Lateral Load Factor Time Mult:1 -> 1.1
Aos Time Mult:1 -> 2
Rate PI D:
Kp:0 -> 0.8
Ki:0 -> 0.05
Imax:0 -> 1
Kd:0 -> 0.005
Angle PI D:
Kp:0 -> 0.5
Imax:0 -> 1
Kd:0 -> 0.005
Lim:[-2147440000.0,2147440000.0] -> [-100.0,100.0]
Aos Pid Mult:
Kp:0 -> 0.5
Ki:0 -> 0.5
Imax:0 -> 2
Kd:0 -> 0.5
Rate Mult:1 -> 0.992064
Lim:[-2147440000.0,2147440000.0] -> [-1.0,1.0]
Throttle:
Limits:[0.0,1.0] -> [0.0,1.1]
Climb Max:[0.0,0.0] -> [-12.0,18.0]
Climb Min Lim By Hor Speed:[0.0,-2147440000.0,0.0,-2147440000.0] -> [40.0,-3.0,70.0,-15.0]
Climb Min Lim By RAltitude:[0.0,-2147440000.0,0.0,-2147440000.0] -> [10.0,-3.0,40.0,-15.0]
Climb PI D:
Kp:0 -> 1
Ki:0 -> 0.3
Imax:0 -> 1.5
Kd:0 -> 0.0005
Rate Mult:1 -> 0.833333
Lim:[-2147440000.0,2147440000.0] -> [0.05,0.9]
Alt PI D:
Kp:0 -> 1
Rate Mult:1 -> 0.833333
Aim:
Heading To Roll:[0.0,0.0,0.0,0.0] -> [3.0,0.0,60.0,46.0]
Roll Rate Max:0 -> 100
Heading To Roll Mult By Ias:[0.0,0.0,0.0,0.0] -> [10.0,0.0,120.0,1.0]
Roll Lim:180 -> 50
Pitch Max:0 -> 40
Pitch Rate Max:0 -> 40
Pitch Lim:180 -> 30
Yaw Heading To Yaw Rate Mult By Ias:[0.0,0.0,0.0,0.0] -> [0.0,1.0,120.0,1.0]
Yaw Heading To Yaw Rate Mult By Req Roll:[0.0,0.0,0.0,0.0] -> [0.0,1.0,55.0,0.1]
Throttle To Yaw Rate Mult:[0.0,1.0,1.0,1.0] -> [0.9,1.0,1.0,0.85]
Yaw Heading To Yaw Rate:[0.0,0.0,0.0,0.0] -> [0.0,0.0,14.0,50.0]
Roll PI D:
Kp:0 -> 2.3
Imax:0 -> 2
Kd:0 -> 0.01
Rate Mult:1 -> 0.833333
Lim:[-2147440000.0,2147440000.0] -> [-2.0,2.0]
Roll Rate PI D:
Kp:0 -> 2.4
Ki:0 -> 1
Imax:0 -> 1
Kd:0 -> 0.01
Rate Mult:1 -> 0.833333
Lim:[-2147440000.0,2147440000.0] -> [-1.0,1.0]
Pitch PI D:
Kp:0 -> 3.7
Ki:0 -> 0.05
Imax:0 -> 0.5
Rate Mult:1 -> 0.833333
Lim:[-2147440000.0,2147440000.0] -> [-0.7,0.7]
Pitch Rate PI D:
Kp:0 -> 3
Ki:0 -> 1
Imax:0 -> 2
Kd:0 -> 0.05
Rate Mult:1 -> 0.833333
Lim:[-2147440000.0,2147440000.0] -> [-1.0,1.0]
Yaw Rate PI D:
Kp:0 -> 3
Ki:0 -> 0.2
Imax:0 -> 1
Kd:0 -> 0.05
Rate Mult:1 -> 0.833333
Lim:[-2147440000.0,2147440000.0] -> [-1.0,1.0]
海象 Mk I:起落架:Water Part 2到33(除了10、12、29):Vertical Offset:-1.5 -> -1
TS250,KAB-50L,GBU-24 宝石路 III:Designation Source Type Mask:5 -> 9
血矛:Designation Source Type Mask:5 -> 9
AKD-9,AKD-10,cn_ba_7,BA-9,AS-30L,Kh-25,Kh-25ML,Kh-29L,S-25L,su_s_25ld,L-UMTAS,us_hellfire_agm_114_a,AGM-114B,AGM-114C,us_hellfire_agm_114_f,AGM-114K,ZT-6 黑曼巴:制导参数:激光导引头:Designation Source Type Mask:5 -> 9
cn_pf10,霹雳-11,超级 530D,超级 530F,R.511,R.530,AS.34,蝮蛇 1A,R-3R,R-23R,R-24R,R-27ER,R-27ER1,R-27R,R-27R1,Rb 71 格斗型,天闪,天闪 格斗型,天闪 超级 TEMP,AIM-54A,us_aim_54b,AIM-54C,AIM-7C,AIM-7D,AIM-7E,AIM-7E-2 格斗型,AIM-7F,AIM-7M,AIM-9C:制导参数:雷达导引头:Designation Source Type Mask:2 -> 4
R.530E,R.550 魔术 1,霹雳-7,R-23T,R-24T,火痕,红头:制导参数:红外导引头:Designation Source Type Mask:2 -> 6
R.550 魔术 2,怪蛇 3,怪蛇 4,霹雳-5B,霹雳-8,R-27ET,R-27T,R-27T1,R-60,R-60M,R-60MK,R-73,RB24J,RB 74,AIM-9G,AIM-9H,AIM-9L,AIM-9M,AIM-9P:制导参数:红外导引头:
Designation Source Type Mask:18 -> 38
Constant Designation Source Type Mask:2 -> 6
RB 75,Flz Lwf LB 82,AGM-65A,AGM-65B:制导参数:红外导引头:Designation Source Type Mask:9 -> 17
2.29.0.78 -> 2.29.0.79
改善了客户端的稳定性