今天一大早,沉迷創業快兩年時間的 B 站知名 up 主稚暉君,終於又正經更新了一期視頻。

發佈後六個小時瀏覽量 70 萬 + ,單純從播放量看雖說已經不比當年,但掏出來傢伙是越來越有看頭了。
這期視頻裡,稚暉君一共花 12 分鐘,詳細介紹了靈犀 X2 這個 “ 悄咪咪研發了三個月 ” 的人形機器人。

跟宇樹、眾擎那些機器人公司每次 po 出來的視頻差不多,靈犀 X2 也是以炫技為主。
現在讓它走路都是大材小用了,踩滑板車穩穩當當。
當年給葡萄縫針的技能,又在靈犀 X2 身上覆刻了一把。

甚至,你現在不需要做夢,就能看到機器人騎自行車了。

不過雖說都是炫技,但世超仔細對比了靈犀 X2 和其他機器人在 “demo” 層面的表現,發現靈犀 X2 更有人味兒。特別是在學人類摳屁股、撓癢癢、抖腿這種小動作上,模仿得確實有味道。
好了咱也不多廢話,靈犀 X2 這次主要實現了運動、交互和作業三個能力的提升,大夥兒直接跟著世超往下看吧。
靈犀 X1 相關參數
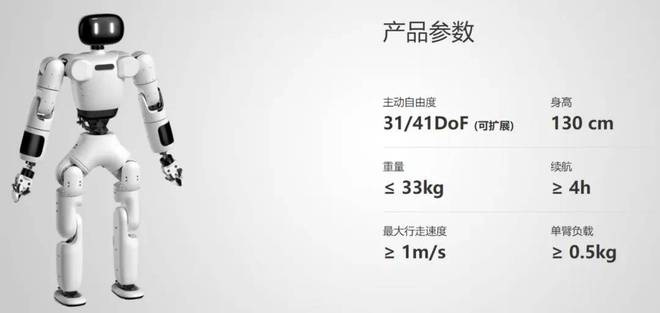
但在本體設計上,稚暉君和他的團隊還是在靈犀 X2 身上花了不少心思。
全身 28 個自由度,體重 33.8 千克,搭載了小腦控制器 Xyber-Edge 、域控制器 Xyber-DCU 和智能電源管理系統 Xyber-BMS。
雖然自由度看著是比靈犀 X1 少了,但靈犀 X2 這次在機械結構的設計上,並沒有採用並聯結構。( 靈犀 X1 是串並聯混合結構 )
也就是說,靈犀 X2 的這 28 個自由度,每一個都可以獨立驅動,少了相互牽制的問題就更好控制了。
而且,在選擇機器人外殼材料的時候,他們就連化妝用的美妝蛋都考慮到了。。。

反正在渲染的短片裡,又是什麼續航從容、散熱無憂,讓世超有一種在看掃地機器人發佈會的感覺。
當然了,這些硬件上的改動只是給靈犀 X2 點了一部分天賦樹,真想炫技,還得靠運動控制算法層面的突破。
根據視頻的介紹,現在足式機器人的運動控制,已經全面從 Model-based 轉向了 learning 驅動的強化學習。
反正在深度強化學習和模仿學習的調教下,靈犀 X2 的運動天賦已經被激活了。
除了前面的騎自行車,靈犀 X2 還可以從走路到跑步,絲滑切換狀態。

科目三也是跳上了,這小腿扭得還挺帶勁。

騎平衡車最後那一下剎車的樣子,更絕了,這玩意兒讓他騎著平衡車送外賣不知道能不能行?

另外,裝了多模態大模型的靈犀 X2 在交互能力上,也有點說法。
別人家的機器人還在想怎麼才能把動作做得漂亮,靈犀 X2 已經坐下來跟你嘮家常了。

不過世超覺得這種跟機器人一問一答的形式,還有所謂的視覺識別,其實並不新鮮。。。
反而是機器人在交互過程中的反應速度,讓世超覺得眼前一亮。在視頻演示中,基本稚暉君的問題拋出去不到 2 秒鐘,靈犀 X2 就能接上話。

而且他們還把動作模態集成到了模型裡,靈犀 X2 的活人感就是這麼來的。
雖然沒有呼吸,但是裝作會呼吸。

這熟悉的撓屁股動作,總覺得好像在哪見過。

就是吧,這個遠程裸眼的 3D 交流,實在是太抽象了。。。我的評價是,不如直接套上吳彥祖的面具好吧。

最後,就是展示靈犀 X2 的幹活兒能力了。
其實主要是強調了,在智元一系列研究成果的加持下,靈犀 X2 能幹的活兒是越來越多了。還舉了個“ 吉祥三保 ” ( 保安、保潔和保姆 )的例子,展望了一把靈犀 X2 可能要進化的方向。
但有一說一,把機器人跟生產力掛鉤那部分,世超並沒有太多的共鳴,或者說實感?不管是靈犀 X2 ,還是其他家的人形機器人,現階段的實用性,似乎都比不上一些專用機器人( 工業機械臂、 AGV 等 )。

不可否認,今年的人形機器人領域確實熱鬧,隔三差五就會有公司發視頻,展示自家機器人又能挑戰哪些高難度動作了。
秀運動控制沒毛病,這畢竟也是進化過程的一部分。但結合前段時間高盛給宇樹科技潑的冷水,即使人形機器人能跑能跳還能後空翻,離真正意義上的 “ 通用 ” 也還遠得很。
就像稚暉君在視頻末尾說的那樣:萊特兄弟的飛機遠比空氣重,圖靈的計算機也曾佔滿整個房間,人們總是高估一個技術的短期價值,而往往低估他的長期價值。
至於人形機器人的 “ChatGPT 時刻 ” 啥時候到來,這個問題,還是交給專業的人來回答吧。
撰文:西西
編輯:江江&面線
美編: 煥妍
圖片、資料來源:
B站:@稚暉君、@智元機器人
部分圖源網絡