日前,在中國電動汽車百人會論壇上,博世智能駕駛中國區總裁吳永橋和元戎啟行CEO周光,又對特斯拉FSD的技術實力進行了評論。

這兩位業內人士都稱特斯拉 FSD技術非常領先——吳永橋稱特斯拉FSD一段式端到端的基座模型算法水平是斷代式領先國內所有的智駕方案,至少領先一到兩年;周光則稱特斯拉 FSD V13確實領先國內一個代差。

這是國內從業人員對特斯拉FSD技術的最新評論,但這兩位行業內技術專家對FSD的評價,卻讓許多評論區用戶破防,並在評論區對這兩位參會者開啟了攻擊模式。
諸如攻擊他們夸特斯拉FSD是因為其自家智駕做得爛,用這種方式拉國產智駕下水;還有稱他們沒有用過國產智駕,崇洋媚外;甚至還從所謂的面相進行人身攻擊,說他們面相不行,所以企業不會好等等……

如此種種,又讓評論區再次成為大型情緒輸出現場。事實上,這也是特斯拉FSD在國內遭遇兩極分化境遇的最新體現。
那麼特斯拉FSD的技術實力究竟怎麼樣?
事實上,在智能駕駛技術上,特斯拉可以說是無可爭議的行業領頭羊,無論是從技術演進路徑的引領性還是從智駕落地成本性而言,均是如此!
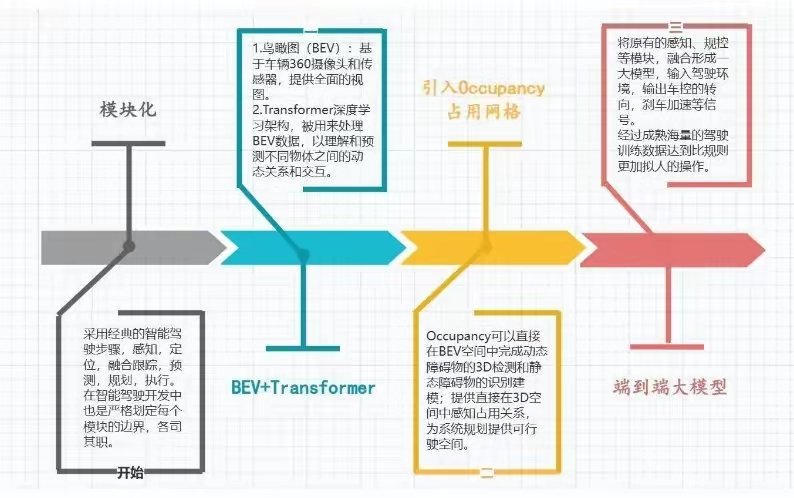
首先從智駕技術演化路徑的引領性來看:縱觀近幾年智能駕駛底層技術的前進方向,不難發現在智能駕駛技術的演進路徑上,特斯拉一直都在引領、驅動著智駕技術的路線進化——從BEV到OCC再至端到端技術,莫不如此!
所以我們看到的是,每一次在特斯拉FSD進行技術路徑演變後,國內廠商的智駕技術路徑也就幾乎沿著特斯拉FSD的技術路徑在演進。
而這種能在智駕技術前進方向上實現對全行業的前進路徑進行引領的能力,事實上就已充分說明了特斯拉在智駕底層技術上的領先性或者說對技術前進路徑預判的精準性。
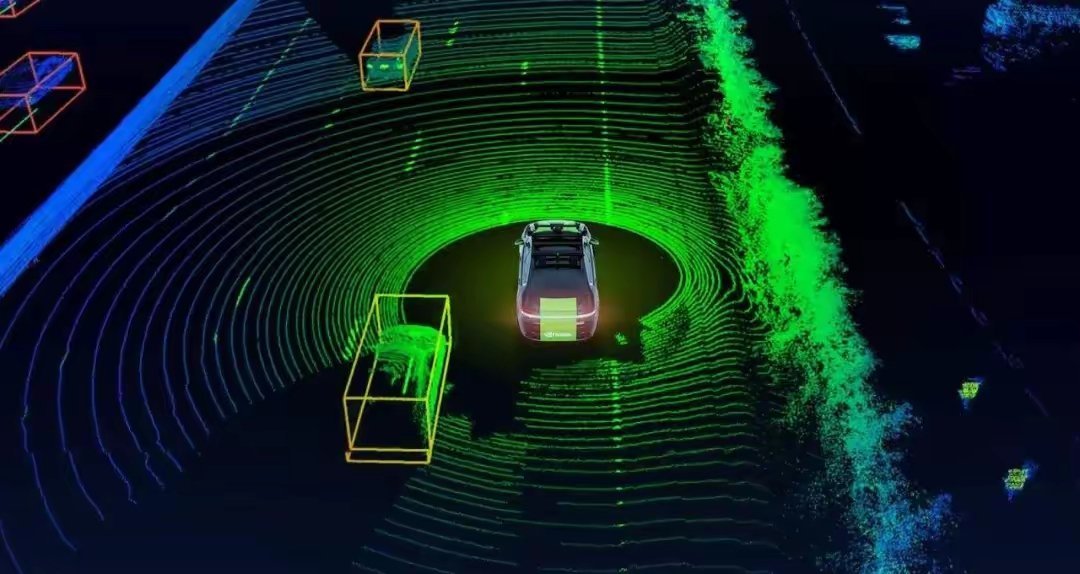
再從智駕感知系統落地硬件路徑來看,事實上目前行業已形成了純視覺與激光雷達+攝像頭多傳感器融合兩大落地路徑。而這種落地路徑差異,也是造成普通用戶對智駕爭議不斷的核心因素。
純視覺支持者認為攝像頭能夠捕獲包括物體顏色、紋理、形狀、對比度、距離等豐富的環境信息,且不需要進行多傳感器數據融合,這使得信息的輸入、判斷、決策、輸出能夠更為快速、準確。
並且從仿生學原理來看,人類僅依靠雙眼就能完成駕駛操作,所以在深度學習算法加持下,汽車依靠攝像頭也能實現高階智駕。而在落地成本上,僅依靠攝像頭的純視覺方案相對以激光雷達為主導的多傳感器融合方案,在落地成本上也更具可行性。

而多傳感器融合派則認為在激光雷達、攝像頭、毫米波雷達、超聲波雷達等多種感知設備的協同工作,能夠彌補單一傳感器的侷限性,實現對環境信息多維度、高精度感知,並且多傳感器加持將使得智駕硬件方案更具冗餘性,更能應對複雜環境下的智駕需要,特別是激光雷達在物體檢測方面,具有先天優勢,所以多傳感器融合支持者認為純視覺在雨雪大霧等極端天氣下,其表現將不及激光雷達。
也正是在這種技術認知下,許多用戶認為國產普遍採用的多傳感器融合方案將優於特斯拉FSD的純視覺方案。
但純視覺真的無法應對用戶所認知的這些極端駕駛場景嗎?
事實上我們看到在FSD實測視頻中,許多傳統認知已經被打破了。
諸如在許多人認為在激光雷達佔優勢的物體檢測上,我們看到特斯拉FSD也具備極強的物體檢測能力,無論是白天還是黑夜,均是如此,同時在極端天氣、視覺欺騙層面,特斯拉FSD純視覺的表現也非常出色,並沒有傳統認知中的純視覺無力應對極端駕駛環境的情況。
也或正是基於純視覺突飛猛進的現實,我們能夠看到國產廠商們事實上也開始在技術路徑上轉向端到端純視覺。
如此種種,足以證明:無論是在底層技術實現層面還是在感知硬件選擇層面,特斯拉的智能駕駛都具備行業引領性。
所以親先進性其實毋庸置疑。

但現實的有趣之處在於:即使業內從業人員密切關注特斯拉FSD的技術動向,但依舊有諸多用戶出於各種原因,拒絕承認特斯拉FSD技術的領先性,對特斯拉FSD嗤之以鼻,甚至認為國內智能駕駛技術已經超越了特斯拉FSD,並且還對在公開場合承認特斯拉FSD技術領先性的從業人員扣帽子、搞人身攻擊、進行情緒輸出。
但問題在於:拒絕承認特斯拉FSD技術領先,難道特斯拉的FSD技術就會落後了嗎?就能讓國產智駕變得更強大嗎?
顯然不會如此,事實上,拒絕承認特斯拉FSD技術領先,並無益於國產智駕進步!
其實,承認優秀並跟進優秀,這並不丟人,反倒能讓自身減少技術試錯成本,少走彎路、加速強大。
所以我們看到的是:真正投身產業的智駕從業人員們,對此還是保持了清晰的認知,對特斯拉每一次的技術路徑演進,都保持了迅速跟進。
在此,也期待國產智能駕駛技術能夠在特斯拉的技術路徑指引下,實現更進一步!
作品聲明:個人觀點、僅供參考
本文由小黑盒作者:小機零 原創
轉載請註明作者及出處